Hola!
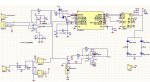
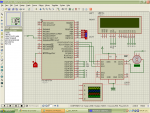
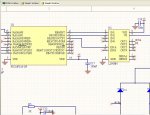
Resulta que estoy trabajando con un Pic16F818 y un driver L298 para manejar un motor DC. Tambien hago uso del PWM del PIC para controlar la velocidad del motor.
El circuito sin motor, funciona correctamente. Las salidas corresponden a lo que deben ser. 0V para el conector que hace girar el motor a la izquierda y 5V para el conector que le hace girar a la derecha.
Pero cuando conecto el motor los valores del conector de salida varían. El polímetro marca en ambos conectores el mismo valor, por lo que el motor no da vueltas. No entiendo porque ocurre esto y llevo varios días pensando y cambiando cosas sin conseguir avanzar nada.
Espero que alguien conozca la respuesta a este rompecabezas.
Saludos!
Resulta que estoy trabajando con un Pic16F818 y un driver L298 para manejar un motor DC. Tambien hago uso del PWM del PIC para controlar la velocidad del motor.
El circuito sin motor, funciona correctamente. Las salidas corresponden a lo que deben ser. 0V para el conector que hace girar el motor a la izquierda y 5V para el conector que le hace girar a la derecha.
Pero cuando conecto el motor los valores del conector de salida varían. El polímetro marca en ambos conectores el mismo valor, por lo que el motor no da vueltas. No entiendo porque ocurre esto y llevo varios días pensando y cambiando cosas sin conseguir avanzar nada.
Espero que alguien conozca la respuesta a este rompecabezas.
Saludos!