


Hola quiero armar un robot sumo sumobot mi idea es esta
el diseño pensava en hacer algo parecido a esto
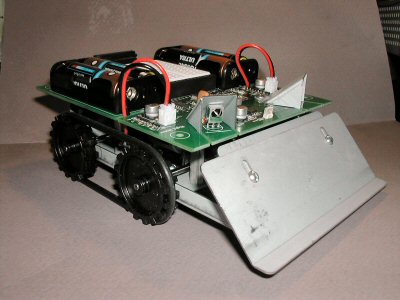
bueno solo la parte de adelante la paleta inclinada, mi idea es esta
poner 4 sensores ultrsonicos en los 4 lados del bot y la funcion de estos sen buscar al bot enemigo, una ves detectado el bot enemigo mi bot girara sobre su propio eje para apuntar con la parte delantera al bot enemigo y atacarlo.
al mismo tiempo tendria varios sensores IR en la parte inferios para no salirse del ring, aun no se cuantos poner y en que lugares.
los sensores IR tendrian un nivel jerarquico mas alto que los ultrasonicos de tal modo que si el sensor ultrasonico encuntra un "enemigo" en x direccion y al aproximarse a este los IR detectan el fin del Ring este se dentrendria e iria en reversa.
el modo de ataque seria con la parte delantera empujar y la paleta que se ve en la imagen mi idea es poder levantarla como una pala de tractor

es decir la paleta de mi bot empujaria y medio levantaria el bot enemigo.
jejeje mi idea original era algo que golpeara al bot enemigo pero es ilegal o algo asi
aun no se que servomotores usar, pensaba en estos

-Engranaje de nylon
-Voltaje de operación: 4.8V-6.0V
-Velocidad: 0.1seg/60grados
-Torque: 1.4kg-cm
-Tamaño: 22.8x11.8x20.6mm
-Peso: 9g
pero creo que son muy deviles que opinas?
aun no se si usar PIC16F84 o arduino o algo que no se progrma jejej solo integrados comunes.
Que me recomiendas?
Ideas o sugerencias?
el diseño pensava en hacer algo parecido a esto
bueno solo la parte de adelante la paleta inclinada, mi idea es esta
poner 4 sensores ultrsonicos en los 4 lados del bot y la funcion de estos sen buscar al bot enemigo, una ves detectado el bot enemigo mi bot girara sobre su propio eje para apuntar con la parte delantera al bot enemigo y atacarlo.
al mismo tiempo tendria varios sensores IR en la parte inferios para no salirse del ring, aun no se cuantos poner y en que lugares.
los sensores IR tendrian un nivel jerarquico mas alto que los ultrasonicos de tal modo que si el sensor ultrasonico encuntra un "enemigo" en x direccion y al aproximarse a este los IR detectan el fin del Ring este se dentrendria e iria en reversa.
el modo de ataque seria con la parte delantera empujar y la paleta que se ve en la imagen mi idea es poder levantarla como una pala de tractor
es decir la paleta de mi bot empujaria y medio levantaria el bot enemigo.
jejeje mi idea original era algo que golpeara al bot enemigo pero es ilegal o algo asi
aun no se que servomotores usar, pensaba en estos
-Engranaje de nylon
-Voltaje de operación: 4.8V-6.0V
-Velocidad: 0.1seg/60grados
-Torque: 1.4kg-cm
-Tamaño: 22.8x11.8x20.6mm
-Peso: 9g
pero creo que son muy deviles que opinas?
aun no se si usar PIC16F84 o arduino o algo que no se progrma jejej solo integrados comunes.
Que me recomiendas?
Ideas o sugerencias?

Última edición: