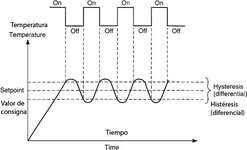
Para que entiendas la idea de la histéresis llevado a la programación en un sistema de control simple.
Supongamos que tenés un sistema de refrigeración que debe activarse cuando la ºT supera un cierto umbral (llamémosle temp_max) y debe desactivarse cuando se alcance otro umbral del ºT (llamémosle temp_min). Entonces la idea sería saber en que estado actual está tu control para tomar una decisión según la ºT actual, ej:
Entonces la idea de separar temp_max de temp_min, es evitar que el control de refrigeración oscile entre 1 y 0 cuando este cerca de esos valores en el corto plazo. Mientras más cerca esten esos valores, mayor es la probabilidad de esa oscilación y cuando temp_min y temp_max son iguales, es muy probable que el sistema oscile. Obviamente en el funcionamiento normal, vas a tener una oscilación, de encendido y apagado, pero más espaciado en el tiempo, al igual que funciona un aire acondicionado.
Supongamos que tenés un sistema de refrigeración que debe activarse cuando la ºT supera un cierto umbral (llamémosle temp_max) y debe desactivarse cuando se alcance otro umbral del ºT (llamémosle temp_min). Entonces la idea sería saber en que estado actual está tu control para tomar una decisión según la ºT actual, ej:
C:
...
temp_actual=lectura_temp();
...
if(refrigeracion_on<1) //Pregunto si el sistema de refrigeración se encuentra apagado
{
if(temp_actual>=temp_max) //Pregunto si se alcanzó la temperatura max con el sistema de refrigeración apagado
{
refrigeracion_on=1; //Enciendo el sistema de refrigeración
}
}// Sistema de refrigeración apagado
else
{
if(temp_actual<=temp_min)
{
refrigeracion_on=0; //Apago el sistema de refrigeración
}
}// Sistema de refrigeración encendido
....Entonces la idea de separar temp_max de temp_min, es evitar que el control de refrigeración oscile entre 1 y 0 cuando este cerca de esos valores en el corto plazo. Mientras más cerca esten esos valores, mayor es la probabilidad de esa oscilación y cuando temp_min y temp_max son iguales, es muy probable que el sistema oscile. Obviamente en el funcionamiento normal, vas a tener una oscilación, de encendido y apagado, pero más espaciado en el tiempo, al igual que funciona un aire acondicionado.
") .
.