Gracias
")
, para considerarse robot simplemente se conecta el control del carro con la interface al puerto paralelo y le programas rutinas. Supongo que éste es mi primer robot.
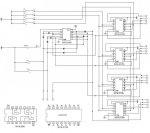
Espero disfruten el diagrama, es básico (lo diseñé en preparatoria), las terminales 1, 2, 3 y 4 representan los "datos" que quieres que se vean en las salidas del Flip-Flop seleccionado, las terminales "A" y "B" son para conmutación (cambiar de Flip-Flop) también se controlan por el puerto de la impresora, para cambiar de Flip-Flop se tiene que intercambiar la señal de los interruptores A y B (núnca se dejan ambas terminales cerradas al mismo tiempo), la terminal marcada como "space" es el reset que sirve para regresarte al primer Flip-Flop.
La interfase (o apretón de manos) es algo así:
paso 1: después de un reset mantengo en ceros las terminales "A" y "B".
paso 2: cierro la compuerta reset (si la dejo abierta nunca iniciara la secuencia de conmutación).
paso 3: mando por las terminales "1" al "4" los datos que quiero en el primer flip-flop
paso 4: activo la terminal "A" para que los datos se cargen en el primer flip-flop
paso 5: desactivo la terminal "A"
paso 6: mando por las terminales "1" al "4" los datos que quiero en el segundo flip-flop
paso 7: activo la terminal "B" para que los datos se cargen en el segundo flip-flop
paso 8: desactivo la terminal "B"...etc
paso x: en cualquier momento, si se quiere cambiar los datos de un Flip-Flop del cual ya paso su turno de conmutación se debera abrir la compuerta "space" para regresarte al primer Flip-Flop e iniciar nuevamente la secuencia de conmutación hasta que le toque el turno al Flip-Flop desado (la compueta "space" equivale al reset de la conmutación).
Nota: el circuito requiere fuente de alimentación externa (no pienses que puedes sacar toda la corriente del puerto paralelo), las salidas de los Flip-Flop se usan para cerrar las compuertas ya sea de relevadores, triacs o SCR tomando en cuenta que es propable que necesites valerte de transistores para amplificar la salida.
Ventajas:
Funciona para cualquier número de salidas (Flip-Flops) sólo tienes que unir las terminales "1" a la "4" del primer circuito a las terminales "1" a la "4" del siguiente circuito y unir las salidas que dejé volando en la parte de abajo con las entradas correspondientes "A" con "A", "B" con "B" y la tercera terminal con "space" del siguiente circuito.
Es fácil adaptar el circuito para funcionar con otro tipo de puerto de la computadora.
Desventajas:
Dependiendo del número de circuitos que conectes se incrementa el tiempo que demora en llegar el turno de conmutación de los últimos Flip-Flop.
Los requerimientos de corriente aumentan en proporción directa al número de circuitos conectados.