Esto es extremadamente basico pero quizas alguno novato como yo le servira. Se usa mucho para medir distancias en los robots.
Basicamente un sensor de ultrasonido, funciona emitiendo un eco sonoro, este ultrasonido al rebotar contra una superficie vuelve. Y con esto el sensor saca, la distancia aproximada al objeto. Basicamente como lo hacen los murcielagos. Alguno quizas me corrija diciendo mas tecnicamente como funciona.
Este video de abajo es una excelente introduccion al sensor ultrasonico.
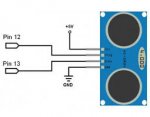
Pero el problema que tiene es que aca en Argentina no se consigue ese sensor del video se consigue el HC-SR04 (que tiene 4 patas no 3).
Asi que aca abajo dejo una prueba que hice con el codigo, la libreria, y el ejemplo para usar 2 sensores a la ves (izquierdo y derecho). Mas el clasico led que parpadea mas rapido segun que tan cerca este el objeto (para el led se coloca una resistencia de 220 a 330 (soy nuevo en la electronica). La resistencia es para no estropear el arduino y el led, cada vez que se use un led se necesitara esta resitencia de abajo.
La libreria usada es la Ultrasonic.h que si mal no recuerdo la pueden bajar de aca.
//6d934dd0-a-62cb3a1a-s-sites.googlegroups.com/site/libreriahcsr04/libreria-hc-sr04-sensor-ultrasonico/Ultrasonic.zip?attachauth=ANoY7coMBJobqDxIpLXBgjOD Wdq6ROOwCRo7vcf1yDWi-1e7gZ242RXDoiVbreWxn6Ll_CRkBoYiMm4LZPKEQJeOWBArhui 8E8rZAA3ayTW_-zkJKxPlCxgPIrZKh_L0fzOHPF3ka5Xm0TC4Dl3PoTijXHPuJk5 3hivO7u0qslQsURhKOiyGzTJCVG_Z36E_-YEmU8GChNE3mtnn7QQEbjarrNm5L0gyzwsWqXvXj1GbtEHKCAp 3qdRraC4NB1mJa2_lh3y1b3_DnznHWpJMJRIq2l4Mvkab4g%3D %3D&attredirects=1&d=1
Basicamente un sensor de ultrasonido, funciona emitiendo un eco sonoro, este ultrasonido al rebotar contra una superficie vuelve. Y con esto el sensor saca, la distancia aproximada al objeto. Basicamente como lo hacen los murcielagos. Alguno quizas me corrija diciendo mas tecnicamente como funciona.
Este video de abajo es una excelente introduccion al sensor ultrasonico.
Pero el problema que tiene es que aca en Argentina no se consigue ese sensor del video se consigue el HC-SR04 (que tiene 4 patas no 3).
Asi que aca abajo dejo una prueba que hice con el codigo, la libreria, y el ejemplo para usar 2 sensores a la ves (izquierdo y derecho). Mas el clasico led que parpadea mas rapido segun que tan cerca este el objeto (para el led se coloca una resistencia de 220 a 330 (soy nuevo en la electronica). La resistencia es para no estropear el arduino y el led, cada vez que se use un led se necesitara esta resitencia de abajo.
Código:
#include
Ultrasonic ultrader(11,10); //pin trig, pin echo
Ultrasonic ultraiz(9,8); //pin trig, pin echo 9,8
int led=5; //pin del arduino que se conecta al led
int distanciader; // variable de distancia del ultrasonico derecho
int distanciaiz; // variable de distancia del ultrasonico izquierdo
int pausa; //retardo del led en encender y apaga dependiendo del sensor
void setup(){
pinMode(led,OUTPUT);
Serial.begin(9600);
}
void loop(){
distanciader = ultrader.Ranging(CM);
distanciaiz = ultraiz.Ranging(CM);
if( distanciader < 15 || distanciaiz < 15){
//pausa = (ultrader.Ranging(CM) * 10);
Serial.print("derecha: ");
Serial.print(ultrader.Ranging(CM)); // CM or INC
Serial.print(" cm " );
Serial.print("izquierda: ");
Serial.print(ultraiz.Ranging(CM)); // CM or INC
Serial.println(" cm " );
pausa = 50;
digitalWrite(led, HIGH);
delay(pausa);
}
digitalWrite(led, LOW);
delay(pausa);La libreria usada es la Ultrasonic.h que si mal no recuerdo la pueden bajar de aca.
//6d934dd0-a-62cb3a1a-s-sites.googlegroups.com/site/libreriahcsr04/libreria-hc-sr04-sensor-ultrasonico/Ultrasonic.zip?attachauth=ANoY7coMBJobqDxIpLXBgjOD Wdq6ROOwCRo7vcf1yDWi-1e7gZ242RXDoiVbreWxn6Ll_CRkBoYiMm4LZPKEQJeOWBArhui 8E8rZAA3ayTW_-zkJKxPlCxgPIrZKh_L0fzOHPF3ka5Xm0TC4Dl3PoTijXHPuJk5 3hivO7u0qslQsURhKOiyGzTJCVG_Z36E_-YEmU8GChNE3mtnn7QQEbjarrNm5L0gyzwsWqXvXj1GbtEHKCAp 3qdRraC4NB1mJa2_lh3y1b3_DnznHWpJMJRIq2l4Mvkab4g%3D %3D&attredirects=1&d=1