hola,
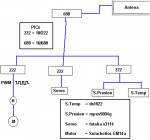
Me encuentro desarrollando un mini vehiculo autonomo sumergible, me gustaria q me dieran su opinion acerca de la arquitectura de control del mismo,
la funcion basica del vehiculo es realizar un recorrido ciego dentro de un pilar de agua de 400 litros, durante su recorrido realizara una extracion de mediciones fisico-quimicas como lo son temperatura, por el momento, a su vez de la profundidad. despues de su recorrido el vehiculo subira a la superficie a transmitir la informacion recabada.
su diseño es basico y extremadamente austero, si requieren mas detalles, los comentan y los respondere, de momento no es mucho lo que tengo, asi como tambien poco lo qUE conosco del tema.
a lo cual agradesco de antemano cualqier critica constructiva, opinion o detalle ^^.
Me encuentro desarrollando un mini vehiculo autonomo sumergible, me gustaria q me dieran su opinion acerca de la arquitectura de control del mismo,
la funcion basica del vehiculo es realizar un recorrido ciego dentro de un pilar de agua de 400 litros, durante su recorrido realizara una extracion de mediciones fisico-quimicas como lo son temperatura, por el momento, a su vez de la profundidad. despues de su recorrido el vehiculo subira a la superficie a transmitir la informacion recabada.
su diseño es basico y extremadamente austero, si requieren mas detalles, los comentan y los respondere, de momento no es mucho lo que tengo, asi como tambien poco lo qUE conosco del tema.
a lo cual agradesco de antemano cualqier critica constructiva, opinion o detalle ^^.
Adjuntos
Última edición por un moderador:
 pero la idea es acabarlo en menos de un mes.
pero la idea es acabarlo en menos de un mes.