Hola amigos
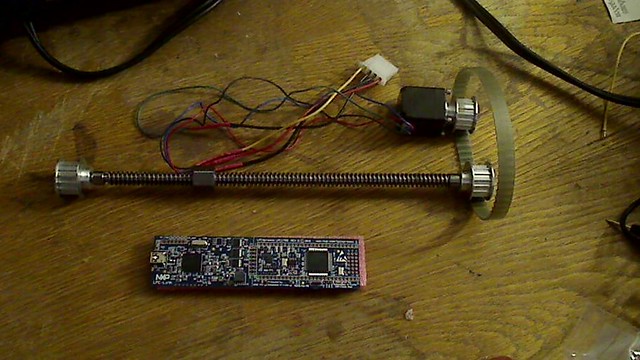
En la construcción den un modelo de velero requiero una función que me permita reconocer cuando una tuerca que es movida por sobre una vara con rosca en forma de trapecio alcanze las posiciones de fin de carrera a ambos extremos. La vara con la rosca es girada usando unos motores de paso recuperados de viejas impresoras, lo que ya me da una información sobre la "posición" de la tuerca. Pero sin un mecanismo que permita verificar la posición real, puede diferir por ejemplo por perdida de pasos, la solución no sería adeciada. Aquí un esquema que muestra el entorno:
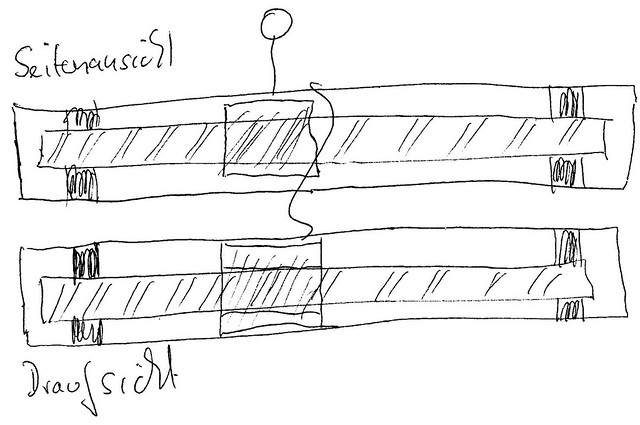
Siendo la imagen arriba la vista lateral y debajo la vista de arriba.
Este recipiente que contiene la vara con la rosca es abierto arriba para permitir el paso de la varilla con la argolla por sobre el nivel de la cubierta. Por allí con seguridad este recipiente se llenara con agua. Y en eso esta el reto. Requiero algo como las soluciones usuales con un microinterruptor que la rosca activaría cerrando un circuito al alcanzar el fin de carrera y así notificando al controlador este evento.
He pensado por ejemplo en usar algún sensor magnético. este se pondria en la pared lateral en algún punto adecuado al fin de la carrera a ambos lados y así este detectaría la aproximación de la tuerca que debería conetner un pequeno magneto. Pero me preocupa que esta técnica no sea lo presiso que requiero como lo fuera una solución mecánica. Ojala me he podido explicar y que alguien me pueda sugerir algo.
Saludos Hellmut
En la construcción den un modelo de velero requiero una función que me permita reconocer cuando una tuerca que es movida por sobre una vara con rosca en forma de trapecio alcanze las posiciones de fin de carrera a ambos extremos. La vara con la rosca es girada usando unos motores de paso recuperados de viejas impresoras, lo que ya me da una información sobre la "posición" de la tuerca. Pero sin un mecanismo que permita verificar la posición real, puede diferir por ejemplo por perdida de pasos, la solución no sería adeciada. Aquí un esquema que muestra el entorno:
Siendo la imagen arriba la vista lateral y debajo la vista de arriba.
Este recipiente que contiene la vara con la rosca es abierto arriba para permitir el paso de la varilla con la argolla por sobre el nivel de la cubierta. Por allí con seguridad este recipiente se llenara con agua. Y en eso esta el reto. Requiero algo como las soluciones usuales con un microinterruptor que la rosca activaría cerrando un circuito al alcanzar el fin de carrera y así notificando al controlador este evento.
He pensado por ejemplo en usar algún sensor magnético. este se pondria en la pared lateral en algún punto adecuado al fin de la carrera a ambos lados y así este detectaría la aproximación de la tuerca que debería conetner un pequeno magneto. Pero me preocupa que esta técnica no sea lo presiso que requiero como lo fuera una solución mecánica. Ojala me he podido explicar y que alguien me pueda sugerir algo.
Saludos Hellmut
")