Buenos dias, estoy intentando calcular un angulo con un acelerometro de 3 ejes, concretamente con el MMA7260Q. Llevo varios dias intentado calcular mediante sin resultados, he conseguido suavizar la señal para reducir el ruido, pero mi problema actualmente es con la fisica, jeje.
Para leer los datos uso un Atmega328 con un A/D de 10 bit de resolucion.
Y me da estos datos cada 100ms)
cada 100ms)
(Giro de sobre X de 0 a 90 grados)
X Y Z
346 355 540
351 361 553
352 361 552
352 361 552
350 359 552
352 360 553
352 360 553
352 360 552
353 361 552
351 361 554
354 360 551
352 362 552
352 361 552
351 362 552
352 360 553
352 361 552
353 361 551
352 361 553
352 361 552
351 361 552
352 361 553
353 360 552
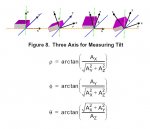
Segun he entendido (lo mas probable es que no lo halla entendido..jeje) en el manual, calcula la acceleracion en cada eje segun: Ax = (Vout -VOFF)/S
No tengo muy claro lo del offset, si es el voltaje anterior a la medicion o el voltaje de referencia del sensor (1650mv). Alguien sabe como debo interpretar que es el offset para este sensor???
A partir de la aceleracion en cada eje, calcula los distintos angulos, por ej:
Φ = ArcTan ( AX/ (Raiz((Ay^2) + (Az^2)) )
Si alguien puede echarme algo de luz, sobre este asunto le estare muy muy agradecido!!
gracias
Para leer los datos uso un Atmega328 con un A/D de 10 bit de resolucion.
Y me da estos datos
cada 100ms)(Giro de sobre X de 0 a 90 grados)
X Y Z
346 355 540
351 361 553
352 361 552
352 361 552
350 359 552
352 360 553
352 360 553
352 360 552
353 361 552
351 361 554
354 360 551
352 362 552
352 361 552
351 362 552
352 360 553
352 361 552
353 361 551
352 361 553
352 361 552
351 361 552
352 361 553
353 360 552
Segun he entendido (lo mas probable es que no lo halla entendido..jeje) en el manual, calcula la acceleracion en cada eje segun: Ax = (Vout -VOFF)/S
No tengo muy claro lo del offset, si es el voltaje anterior a la medicion o el voltaje de referencia del sensor (1650mv). Alguien sabe como debo interpretar que es el offset para este sensor???
A partir de la aceleracion en cada eje, calcula los distintos angulos, por ej:
Φ = ArcTan ( AX/ (Raiz((Ay^2) + (Az^2)) )
Si alguien puede echarme algo de luz, sobre este asunto le estare muy muy agradecido!!
gracias