Soy nueva en ésta página y tengo una duda... tengo un motor reciclado, del cual no tengo ni la menor idea de cuales son sus características, tampoco tengo el modelo del mismo, quiero conocer cuales son las características como el voltaje máximo al que trabaja , la corriente que consume, etc etc.
Había pensado en tomar las lecturas con un tacómetro, pero me resultan muy poco precisas y mi duda tiene que ver con la física, pero en las formulas que encuentro de las bobinas, todas me piden (o las que yo he visto) el coeficiente de auto inducción... el cual... no tengo idea de cómo se saca o me piden la variación de corriente... la cual no se como medir, con un amperímetro? Y me pongo a ver cada cuanto cambia o cómo? Como podrán ver me encuentro sumamente perdida, por favor oriéntenme ! Se los agradecere mucho !
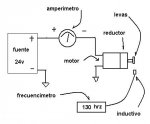
El mio es un motor dc con tren de engranes, es pequeño y es reciclado, pero no cuento con ninguna hoja de datos, ni tampoco el modelo del motor, como puedo saber sus características ? Muchas gracias !
Había pensado en tomar las lecturas con un tacómetro, pero me resultan muy poco precisas y mi duda tiene que ver con la física, pero en las formulas que encuentro de las bobinas, todas me piden (o las que yo he visto) el coeficiente de auto inducción... el cual... no tengo idea de cómo se saca o me piden la variación de corriente... la cual no se como medir, con un amperímetro? Y me pongo a ver cada cuanto cambia o cómo? Como podrán ver me encuentro sumamente perdida, por favor oriéntenme ! Se los agradecere mucho !
El mio es un motor dc con tren de engranes, es pequeño y es reciclado, pero no cuento con ninguna hoja de datos, ni tampoco el modelo del motor, como puedo saber sus características ? Muchas gracias !