Hola a todos, tengo un proyecto el cual con el pic16f84a se tiene que controlar las grados de un servomotor a Rb0 por ejemplo: si presiono pulsador en Ra0 el servo se va a 0º y si vuelvo a presionar el mismo pulsador se vaya a 30º y así hasta 180º y con otro pulsador en Ra1 vaya de 180º a 150º y asi hasta 0º.
Tengo esta programación (c) pero lo que hace es ir de 135º y -135º sin parar, agradecería mucho su ayuda en la programación la lograr lo postulado anteriormente, un saludo.
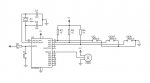
Simulación:
Ver el archivo adjunto Servomotor.zip
Tengo esta programación (c) pero lo que hace es ir de 135º y -135º sin parar, agradecería mucho su ayuda en la programación la lograr lo postulado anteriormente, un saludo.
Código:
#include <16F84a.h>
#use delay(clock=4000000)
#fuses NOWDT,NOPROTECT,
int retardo;
void main()
{ retardo=5;
WHILE(input(PIN_a0))
{
output_high(PIN_B0);
output_high(PIN_B1);
}
do{
if(!input(pin_a1)&&(input(pin_a1)))
{
OUTPUT_HIGH(PIN_B0);
OUTPUT_LOW(PIN_B1);
delay_ms(500); }
if(input(pin_a0)&&(!input(pin_a1)))
{
OUTPUT_LOW(PIN_B0);
OUTPUT_HIGH(PIN_B1);
delay_ms(retardo); }}while(true);
}Simulación:
Ver el archivo adjunto Servomotor.zip
Última edición por un moderador:
 ) bueno a base de eso intente hacer parte del programa que necesito, pero no funciona, no soy muy bueno en esto
) bueno a base de eso intente hacer parte del programa que necesito, pero no funciona, no soy muy bueno en esto  espero alguien me pueda decir en que estoy mal ...
espero alguien me pueda decir en que estoy mal ...