Quiero pedirles el gran favor de orientarme como construir paso a paso un robot seguidor de linea linea,incluyendo el plano y lista de materiales.Aunque tengo algunos conocimnientos basicos en electronica necesito de todo su apoyo. Mil gracias


Follow along with the video below to see how to install our site as a web app on your home screen.

Nota: This feature currently requires accessing the site using the built-in Safari browser.
Francisco Galarza dijo:Hola, a mí una vez se me había ocurrido hacer uno así y te cuento lo que pude hacer:
Probé con un led y un fototransistor que apuntaran sobre el piso y que reflejara sobre una línea. El problema era el piso, habia pisos que reflejaba la luz y otros que no, entonces me trabé.
Después se me ocurrió hacer un seguidor de paredes, es decir, un autito que andubiera solo sin chocar nada y cuando llega a una pared, dobla y la sigue. Bueno para esto los sensores que usé eran también leds infrarrojos con fototransistores pero manejados por un 567, de esta manera evitaba interferencias con la luz ambiente.
Después de esto me dieron ganas de hacer un amplificador de calidad y abandoné el proyecto del seguidor de paredes
Javier Marchetti dijo:Francisco Galarza dijo:Hola, a mí una vez se me había ocurrido hacer uno así y te cuento lo que pude hacer:
Probé con un led y un fototransistor que apuntaran sobre el piso y que reflejara sobre una línea. El problema era el piso, habia pisos que reflejaba la luz y otros que no, entonces me trabé.
Después se me ocurrió hacer un seguidor de paredes, es decir, un autito que andubiera solo sin chocar nada y cuando llega a una pared, dobla y la sigue. Bueno para esto los sensores que usé eran también leds infrarrojos con fototransistores pero manejados por un 567, de esta manera evitaba interferencias con la luz ambiente.
Después de esto me dieron ganas de hacer un amplificador de calidad y abandoné el proyecto del seguidor de paredes
Hola viejo! yo tb estudio en la UTN en mi caso en la regional Tucumán y estaba pensando hacer algo parecido a tu auto seguidor de paredes, te pediría si no fuera mucha molestia algo de información de tu proyecto, algo que me pueda ser de guía por lo menos, desde ya muchas gracias
Leonardo dijo:utilizas con un amplificador operacional cmo comparador!
jose_flash Publicado: Lun Nov 05, 2007 9:52 am Asunto:
--------------------------------------------------------------------------------
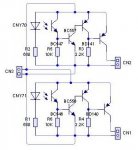
sip es verdad ,pero lo queria decir si tiene sentido este diagrama que es que me viene en la web ,lo de los motores lo tengo controlado son dos motores de aeromolelismo que me dieron ,van a 6 V consumen poco ya que el avion en total consume 250 mah y van a 3500 rpm y tienen una gran fuerza . este es el diagrama que venia en la wed y lo otro el supuesto robot armado . gracias por tu atensión
anthony123 Publicado: Lun Nov 05, 2007 10:21 am Asunto:
--------------------------------------------------------------------------------
Al ver los videos me ilusione!
Por que la cosa ta chida. supero que un circuito tan sencillo haga eso.charlylex dijo:Hola de nuevo!
Me da gusto que les gustaran los videos!
Hola Anthony. te ilucionaste?, porque?
Gracias Bye bye