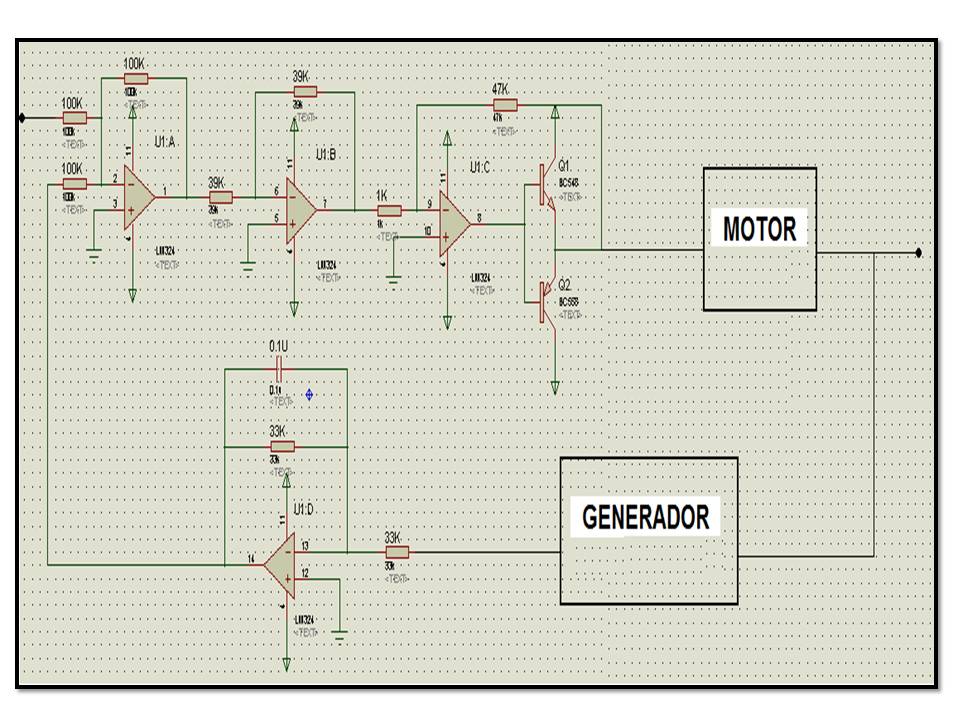
bueno me gustaria que alguien pudiera explicarme el diagrama que pongo en el link, se que estoy rompiendo las reglas pero realmente necesito la ayuda, como podrán notar el circuito es para controlar la velocidad de un motor con un control proporcional, pero no me mencionan los voltajes para utilizar ni si estos deben de ser voltajes positivos o negativos, se que esto se logra con una fuente simétrica, no cuento con ella pero puedo construir una con 2 fuentes de voltaje variable con las que cuento, la verdad es ya lo he armando pero no me funciona, se supone que al frenar el motor el voltaje a su entrada aumente, pero no lo hace, no entiendo muy bien como este hecho y lamentablemente el usuario que creó este diseño no responde las dudas, espero alguien pueda ayudarme y comprenda mi situacion (borrar los espacios en el link)
los materiales utilizados son:
-LM324(Amplificador operacional x4)
-BC548 sustituido por un 2N3904
-BC558 sustituido por un 2N3906
-3xR100K
-2xR39K
-R1K
-R47k
-2xMOTOR DC PEQUEÑO(1 como motor y otro como generador)
-2xR33K
-C104(capacitor ceramica 0.1uF)
el link hacia la página es:
http://bapg-proelectro.blogspot.mx/2011/09/control-proporcional-de-velocidad-de-un.html
los materiales utilizados son:
-LM324(Amplificador operacional x4)
-BC548 sustituido por un 2N3904
-BC558 sustituido por un 2N3906
-3xR100K
-2xR39K
-R1K
-R47k
-2xMOTOR DC PEQUEÑO(1 como motor y otro como generador)
-2xR33K
-C104(capacitor ceramica 0.1uF)
el link hacia la página es:
http://bapg-proelectro.blogspot.mx/2011/09/control-proporcional-de-velocidad-de-un.html
Última edición por un moderador:
") , por aquí encuentras como programarlo, pero con PIC de 8 pines eso si seria algo complicado habría que implementarlo con un operacional, con Arduino sale en 1 minuto
, por aquí encuentras como programarlo, pero con PIC de 8 pines eso si seria algo complicado habría que implementarlo con un operacional, con Arduino sale en 1 minuto