Buenos días a todos!
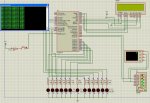
Quisiera plantearos lo que quiero conseguir: tengo unas máquinas con las que me comunico desde un pc a traves del puerto serie. lo que obtengo desde las maquinas es una de cadena de texto que contiene diversa informacion la cual extraigo con funciones sencillas en visual.basic y que posteriormente uso para otros objetivos. Hasta aquí sin problema.Lo que ahora me gustaria es utilizar ese string de salida y controlar el encendido de varios leds segun la informacion que contiene. Por ejemplo, digamos que obtengo algo \'**130***120***190***\', me gustaria ser capaz de extraer los valores de manera que una serie de leds simulen un rango entre 120 y 190 y se enciendan solo los equivalentes al 130. Obviamente quiero hacerlo sin la intervencion del PC.
Querria saber si creeis si es posible o no llevar a cabo este proyecto, antes de embarcarme en comprar material y demás. Si veis que esposible,agradecería de veras cualquier pista sobre cómo realizarlo. En mi ignorancia sobre microcontroladores se me ha ocurrido que quizá podria hacerlo con algún PIC o algo así, pero jamás he trabajado con ellos, aunque pienso que si puedo programarlo en una PC, tambien podria hacerlo en un microcontrolador investigando lo que hiciera falta.
Espero haberme medio explicado,
Muchisimas gracias de antemano!
Saludos! ...
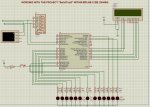
Quisiera plantearos lo que quiero conseguir: tengo unas máquinas con las que me comunico desde un pc a traves del puerto serie. lo que obtengo desde las maquinas es una de cadena de texto que contiene diversa informacion la cual extraigo con funciones sencillas en visual.basic y que posteriormente uso para otros objetivos. Hasta aquí sin problema.Lo que ahora me gustaria es utilizar ese string de salida y controlar el encendido de varios leds segun la informacion que contiene. Por ejemplo, digamos que obtengo algo \'**130***120***190***\', me gustaria ser capaz de extraer los valores de manera que una serie de leds simulen un rango entre 120 y 190 y se enciendan solo los equivalentes al 130. Obviamente quiero hacerlo sin la intervencion del PC.
Querria saber si creeis si es posible o no llevar a cabo este proyecto, antes de embarcarme en comprar material y demás. Si veis que esposible,agradecería de veras cualquier pista sobre cómo realizarlo. En mi ignorancia sobre microcontroladores se me ha ocurrido que quizá podria hacerlo con algún PIC o algo así, pero jamás he trabajado con ellos, aunque pienso que si puedo programarlo en una PC, tambien podria hacerlo en un microcontrolador investigando lo que hiciera falta.
Espero haberme medio explicado,
Muchisimas gracias de antemano!
Saludos! ...

")