Meta muchísimas gracias!, este fin de semana intentaré analizar esos ejemplos que me envías, aunque yo de momento no he utilizado UART, porque veo que puedo avanzar sin recurrir a ese sistema, que parece más complicado. Aprecio de veras la molestia en subir los ejemplos.
En cuanto a la última cuestión que planteaba, creo que no me había explicado bien. Básicamente, lo que quería que hiciera mi programa lo he conseguido: leer continuamente una cadena de caracteres provenientes de una balanza y encender o apagar unos LEDs tras analizar los valores numéricos contenidos en esa cadena. Dicho programa lo he llevado a cabo con el PIC18F4550, MPLAB X IDE y el CSS compiler. El tema es que me he dado cuenta de que tengo disponible un PICF16F876A pero el "problema" es que no consigo que se ejecute correctamente el mismo programa para este último microcontrolador, concretamente la instrucción "gets(cadena)", y por eso subí ese código tan básico, para comprobar dónde estaba el problema. ¿hay alguna diferencia en la manera de obtener la información para diferentes PICs??. En cuanto al max232, la báscula a la que conecto el PIC ya me proporciona +5V, por que podría alimentar la PIC sin necesidad de ese circuito adicional no?
Espero haberme explicado bien, y si no lo he hecho antes pido disculpas
Muchas gracias!
Mencionar por último que he eliminado todo lo que tenía que ver con el LCD, ya que lo coloqué tan solo para verificar los valores numéricos en tiempo real.
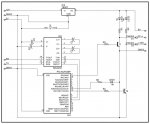
En cuanto a la última cuestión que planteaba, creo que no me había explicado bien. Básicamente, lo que quería que hiciera mi programa lo he conseguido: leer continuamente una cadena de caracteres provenientes de una balanza y encender o apagar unos LEDs tras analizar los valores numéricos contenidos en esa cadena. Dicho programa lo he llevado a cabo con el PIC18F4550, MPLAB X IDE y el CSS compiler. El tema es que me he dado cuenta de que tengo disponible un PICF16F876A pero el "problema" es que no consigo que se ejecute correctamente el mismo programa para este último microcontrolador, concretamente la instrucción "gets(cadena)", y por eso subí ese código tan básico, para comprobar dónde estaba el problema. ¿hay alguna diferencia en la manera de obtener la información para diferentes PICs??. En cuanto al max232, la báscula a la que conecto el PIC ya me proporciona +5V, por que podría alimentar la PIC sin necesidad de ese circuito adicional no?
Espero haberme explicado bien, y si no lo he hecho antes pido disculpas
Muchas gracias!
Mencionar por último que he eliminado todo lo que tenía que ver con el LCD, ya que lo coloqué tan solo para verificar los valores numéricos en tiempo real.
")