Hola gente,
Actualmente estoy enfrascado en un proyecto con un micro con el cual tengo q controlar la velocidad de un motor, para lo cual tengo un tacogenerador o sensor q mide el voltage de salida del motor, pero dicho motor gira en los 2 sentidos por lo q m da voltage negativo y positivo y a la hora de trabajar con el CAD, solo convierte los valores positivos.
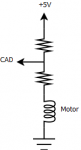
Los voltages de salida del sensor suelen variar entre -2 y 2V aproximadamente, por lo que se me ocurrio la idea de conectar un divisor de tension resistivo (10K) alimentado con 5V directamente del micro para asi conseguir variar la tension de salida del sensor entre los valores positivos de 0.5 - 4.5 V y obtener los valores correctos tras la conversion para poder operar con el software.
Entonces mis 2 preguntas son:
1) Segun la figura de abajo (sorry x el paint pero no tenia nada mejor a mano) estaría exa la conexion correctamente? Pq por algun motivo q desconozco no me funciona...
2) Si consigo ese rango de valores, al convertirlos con el CAD y poder operar en software el 0.5V corresponderia al valor 0 y los 4.5V al 1023 no??
http://imageshack.us/photo/my-images/820/cosad.jpg
Un saludo
Actualmente estoy enfrascado en un proyecto con un micro con el cual tengo q controlar la velocidad de un motor, para lo cual tengo un tacogenerador o sensor q mide el voltage de salida del motor, pero dicho motor gira en los 2 sentidos por lo q m da voltage negativo y positivo y a la hora de trabajar con el CAD, solo convierte los valores positivos.
Los voltages de salida del sensor suelen variar entre -2 y 2V aproximadamente, por lo que se me ocurrio la idea de conectar un divisor de tension resistivo (10K) alimentado con 5V directamente del micro para asi conseguir variar la tension de salida del sensor entre los valores positivos de 0.5 - 4.5 V y obtener los valores correctos tras la conversion para poder operar con el software.
Entonces mis 2 preguntas son:
1) Segun la figura de abajo (sorry x el paint pero no tenia nada mejor a mano) estaría exa la conexion correctamente? Pq por algun motivo q desconozco no me funciona...
2) Si consigo ese rango de valores, al convertirlos con el CAD y poder operar en software el 0.5V corresponderia al valor 0 y los 4.5V al 1023 no??
http://imageshack.us/photo/my-images/820/cosad.jpg
Un saludo
Última edición: