Hola Foreros: hace una banda que no estoy por aca. La duda es la siguiente. Con un 555 quiero controlar un servo chiquito, con eso no hay problema ya que encontre un circuito que con un 555 y un pote que lo controla. Con el pote se consigue distintas frecuencias a la salida de forma tal que el servo busca la posicion indicada. Pero yo no quiero depender del pote, quiero que el servo avance hasta una posicion determinada y que despues de un cierto tiempo retorne a la posicion original. En la posicion original tambien debe esperar un cierto tiempo y reiniciar todo el ciclo. Para mi todo esto es un bolonqui. Pense que podria usar 2 circuitos como los que ya nombre cada uno regulado en la frecuancia que necesito, pero tengo que ligarlos de alguna manera por medio de las temporizaciones. Ademas los tiempos de espera en ambas posiciones del servo deben ser regulables entre 0,1 seg y 1,5 seg. Saludos y desde ya muchas gracias si alguien me puede tirar alguna idea o circuito que me sirva.

Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.

Nota: This feature currently requires accessing the site using the built-in Safari browser.
Estás usando un navegador obsoleto. No se pueden mostrar este u otros sitios web correctamente.
Se debe actualizar o usar un navegador alternativo.
Se debe actualizar o usar un navegador alternativo.
Dudas con el 555 y control de servo
- Autor Daniele
- Fecha de inicio
pandacba
Recordado
Como estas, podrias utilzar terminos correctos cosa que quien lea pueda entender perfectamente todo, no te olvides que es un foro internacional y loa regionalismos deben evitarse asi como las abreviaturas.
Imagina que un forista de habla no hispana, traduce tu mensaje, que puede entende por "banda" o "tirar"
Con un buen lenguaje será más fácil una pronta respuesta y más cantidad de ellas....
Hablas de frecuencia y un servo, asi en el aire no se entiende nada, es un servo del tipo radio control?, detalla un poco y sube un esquema de coneccionado, asi sea un dibujo a mano.... para poder analizar y aconsejarte de la manea más apropiada
Imagina que un forista de habla no hispana, traduce tu mensaje, que puede entende por "banda" o "tirar"
Con un buen lenguaje será más fácil una pronta respuesta y más cantidad de ellas....
Hablas de frecuencia y un servo, asi en el aire no se entiende nada, es un servo del tipo radio control?, detalla un poco y sube un esquema de coneccionado, asi sea un dibujo a mano.... para poder analizar y aconsejarte de la manea más apropiada
Hola Pandabca: perdón si no usé el lenguaje adecuado, no fue mi intención. A ver si puedo explicar mejor de que se trata. Estoy tratando de controlar un servomotor de radio control. Estos servos tienen 3 cables de conexión, 2 se usan para alimentación y el tercero es de control. Por ese cable de control se le envía una señal PWM. El servo tiene, en forma interna, una placa que traduce la frecuencia que recibe por ese cable en un movimiento angular hasta alcanzar una posición determinada justamente por la frecuencia y mantiene esa posición. La particularidad de estos servos es que mientras la señal PWM mantenga su valor en frecuencia, la posición angular del servo no varía. Lo que no sé es que pasa cuando el servo deja de recibir señal. Resumiendo: para que el servo varíe su posición angular se debe variar la frecuencia del PWM. En el circuito que yo encontré, esto se realiza con facilidad con un 555. En ese circuito hay un potenciómetro (P1) que lo que hace es variar la frecuencia de la salida 3 del 555 de forma tal que el servo puede adquirir distintas posiciones angulares. Pero para lo que quiero hacer, no puedo depender del potenciómetro, ya que las variaciones angulares del servo deben ser automáticas. Debe alcanzar una posición (llamemosla A), por lo tanto debe recibir una señal PWM de frecuencia A. Luego de un tiempo (que debe ser regulable) en esa posición, el servo debe alcanzar otra posición (llamemosla B), por lo tanto el servo debe recibir una señal PWM de frecuencia B y esperar otro tiempo (que también debe ser regulable) y reiniciar todo el ciclo. Es decir que nuevamente debe ir a la posición A, esperar un tiempo, luego alcanzar la posición B, esperar un tiempo y asi sucesivamente. Todo ese ciclo no puede durar mas de 1 segundo.
Pienso que si tengo 2 circuitos como ese, tendré 2 potenciómetros desde donde podré regular (y dejar fijas) las 2 frecuencias que se necesitan para que el servo pueda alcanzar las 2 posiciones. Entonces si yo tengo las 2 salidas de los 2 circuitos, solo tengo que lograr que trabajen en forna alternativa sobre el servo durante tiempos que pueden ser distintos y los que se deben regular. Lo que no se, es como hacer para que estos 2 circuitos trabajen alternativamente. Entiendo no se puede hacer con algún temporizador que active un relé que permita seleccionar cual salida está trabajando sobre el servo.
No quiero ser más extenso, no quiero aburrir. Si alguien me puede ayudar con alguna idea y con algún cicuito les agradezco desde ya.
Saludos
http://www.todorobot.com.ar/documentos/servomotor.pdf
Pienso que si tengo 2 circuitos como ese, tendré 2 potenciómetros desde donde podré regular (y dejar fijas) las 2 frecuencias que se necesitan para que el servo pueda alcanzar las 2 posiciones. Entonces si yo tengo las 2 salidas de los 2 circuitos, solo tengo que lograr que trabajen en forna alternativa sobre el servo durante tiempos que pueden ser distintos y los que se deben regular. Lo que no se, es como hacer para que estos 2 circuitos trabajen alternativamente. Entiendo no se puede hacer con algún temporizador que active un relé que permita seleccionar cual salida está trabajando sobre el servo.
No quiero ser más extenso, no quiero aburrir. Si alguien me puede ayudar con alguna idea y con algún cicuito les agradezco desde ya.
Saludos
http://www.todorobot.com.ar/documentos/servomotor.pdf
pandacba
Recordado
La mayor parte de los servos tienen un potenciometro y lo que se envia por el tercer cable es un nivel de tensión, al girar el servo e igualarse la tensión de ref con la del cursor se detiene
El control pwm suele estar en la placa de control, fijate bien en este detalle para no tener problemas.
Que marca y modelo de servos tenes? hacete algun diagrama de tu idea asi se visualiza mejor el conjunto y te podemos ayudar a concretar tu proyecto.
Quedamos a la espera de esa información
Un Cordial saludo
PD: No aburres, por el contrario es preferible una descripción pormenorizada del asunto para tener una mejor idea
El control pwm suele estar en la placa de control, fijate bien en este detalle para no tener problemas.
Que marca y modelo de servos tenes? hacete algun diagrama de tu idea asi se visualiza mejor el conjunto y te podemos ayudar a concretar tu proyecto.
Quedamos a la espera de esa información
Un Cordial saludo
PD: No aburres, por el contrario es preferible una descripción pormenorizada del asunto para tener una mejor idea
Hola Pandacba: ¿pudiste ver el link? Ahí esta el circuito y hay una explicación de como trabaja un servo. Lo que yo quiero es armar 2 circuitos con el 555 y hacer que durante un tiempo trabaje uno y luego trabaje el otro. Aun no tengo el servo. Una pregunta ¿como se sube una imagen al foro? Solo pude poner la referencia al llink.
http://www.todorobot.com.ar/documentos/servomotor.pdf
Despues de buscar un poco encontre la forma de subir un archivo.
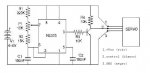
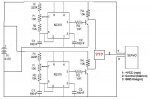
Estos son los circuitos que consegui. El que tiene un solo 555 es el original que encontré. El que tiene dos 555 es el que yo etoy pensando. El el rectangulo donde estánlos sognos de interrogación es donde (creo) deberia hacerse todo el control de tiempos.
Saludos y gracias
http://www.todorobot.com.ar/documentos/servomotor.pdf
Despues de buscar un poco encontre la forma de subir un archivo.
Estos son los circuitos que consegui. El que tiene un solo 555 es el original que encontré. El que tiene dos 555 es el que yo etoy pensando. El el rectangulo donde estánlos sognos de interrogación es donde (creo) deberia hacerse todo el control de tiempos.
Saludos y gracias
Adjuntos
Última edición:
pandacba
Recordado
para subir una imagen debajo de le ventana de edición, a la derecha del boton enviar respuetas, tenes otro que dicer ir a avanzado, hace click alli y te parecen una serie de opciones entre ellas adjuntar archivos, luego se despliega una ventana para poder subirlos y te aparece el limite de tamaño y peso para cada tipo de archivo
Por otro lado, cual seria la necesidad de trabajar con dos controles? es para ver como se implementa lo que queres hacer
Por otro lado, cual seria la necesidad de trabajar con dos controles? es para ver como se implementa lo que queres hacer
Puedes utilizar un 555 que controle la activación y desactivación de los otros dos 555. Ahora, tú, puedes jugar con los valores de los condensadores y los potenciómetros para ajustarlos a lo que quieres. Por supuesto que los leds y sus resistencias los puedes eliminar.
Saludos.
Saludos.
Adjuntos

Última edición:
Gracias Pandabca:
Ya se que parece medio loco, pero estoy diseñando un reloj de madera mecanico similar a los de pendulo, solo que quiero reemplazar el pendulo (que en definitiva es quien le da el "CLOCK" al reloj) por otro mecanismo. Se me ocurre que el movimiento de ida y vuelta que tiene un servo de radio control es ideal para esto, ya que puede posicionarse siempre en el mismo lugar. Ese movimiento, mecanica mediante, me daria el clock justo para que el reloj se mueva sin adelantar ni atrasar. Por supuesto, es necesario que todo el movimiento de ida y vuelta no dure mas de 1 segundo y por supuesto, tiene que poder ajustarse. Ademas, tambien debe poder ajustarse el angulo de barrido del servo, es decir la posicion inicial y la final. El hecho de tener los dos controles me permite precisamente ajustar la posicion inicial y final del servo, es decir que lograria de esa manera que siempre se posicione en el mismo lugar, esto es importante porque el servo actua sobre una leva mecanica que no puede moverse mas de un determinado angulo, si ese angulo se excede la leva o algun otro mecanismo podria romperse, por otro lado, si ese angulo no se cumple (es decir si el barrido del servo es corto) la leva no se movera el angulo necesario con lo que el reloj empesaria a atrasar.
Respecto del movimiento del reloj es por medio de la tradicional cuerda, asi que esto no es un problema. El servo solo sirve para darle al reloj el CLOCK. Ya tengo todos los mecanismos diseñados, inclusive el de cuerda, aunque me falta el mecanismo para poner en hora el reloj.
Gracias Manuel51:
Voy a a estudiar un poco el circuito que me enviaste y es casi seguro que te haré algunas consultas.
Gracias Nuevamente y saludos
Ya se que parece medio loco, pero estoy diseñando un reloj de madera mecanico similar a los de pendulo, solo que quiero reemplazar el pendulo (que en definitiva es quien le da el "CLOCK" al reloj) por otro mecanismo. Se me ocurre que el movimiento de ida y vuelta que tiene un servo de radio control es ideal para esto, ya que puede posicionarse siempre en el mismo lugar. Ese movimiento, mecanica mediante, me daria el clock justo para que el reloj se mueva sin adelantar ni atrasar. Por supuesto, es necesario que todo el movimiento de ida y vuelta no dure mas de 1 segundo y por supuesto, tiene que poder ajustarse. Ademas, tambien debe poder ajustarse el angulo de barrido del servo, es decir la posicion inicial y la final. El hecho de tener los dos controles me permite precisamente ajustar la posicion inicial y final del servo, es decir que lograria de esa manera que siempre se posicione en el mismo lugar, esto es importante porque el servo actua sobre una leva mecanica que no puede moverse mas de un determinado angulo, si ese angulo se excede la leva o algun otro mecanismo podria romperse, por otro lado, si ese angulo no se cumple (es decir si el barrido del servo es corto) la leva no se movera el angulo necesario con lo que el reloj empesaria a atrasar.
Respecto del movimiento del reloj es por medio de la tradicional cuerda, asi que esto no es un problema. El servo solo sirve para darle al reloj el CLOCK. Ya tengo todos los mecanismos diseñados, inclusive el de cuerda, aunque me falta el mecanismo para poner en hora el reloj.
Gracias Manuel51:
Voy a a estudiar un poco el circuito que me enviaste y es casi seguro que te haré algunas consultas.
Gracias Nuevamente y saludos
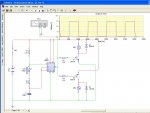
Gracias Manuel51: creo que este circuito es mas simple, solo tengo un par de dudas:
1) No interpreto que sin MT1 y MT2. ¿Son motores de continua?
2) Interpreto que el instrumento XSC1 está registrando una onda cuadrada en la salida 3 del 555 ¿es correcto?
3) No entiendo que representan los unos y los ceros en las lineas del circuito. ¿Son los estados binarios del circuito en determinado instante o simplemente indican VCC en ese punto?
4) Así como está: ¿MT2 está en marcha y MT1 está detenido?
5) ¿VR2 cambia la amplitud de la onda cuadrada?
Ya se que son muchas preguntas, pero no estoy muy practico leyendo circuitos.
Gracias nuevamente
1) No interpreto que sin MT1 y MT2. ¿Son motores de continua?
2) Interpreto que el instrumento XSC1 está registrando una onda cuadrada en la salida 3 del 555 ¿es correcto?
3) No entiendo que representan los unos y los ceros en las lineas del circuito. ¿Son los estados binarios del circuito en determinado instante o simplemente indican VCC en ese punto?
4) Así como está: ¿MT2 está en marcha y MT1 está detenido?
5) ¿VR2 cambia la amplitud de la onda cuadrada?
Ya se que son muchas preguntas, pero no estoy muy practico leyendo circuitos.
Gracias nuevamente
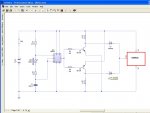
MT1 y MT2 es donde has de conectar el servo. XSC1 es un osciloscopio. Los unos y los ceros son niveles lógicos. Con VR1 se cambia la fecuencia de oscilación del 555. También se cambia con C1. Con los valores del circuito, el período es de un segundo.Te adjunto un esquema.
Saludos.
Saludos.
Adjuntos
Si si, ya se, un poco tarde. Pero lo arme segun lo indicado por Manuel51 y funciona. Ahora tengo un clock para mi reloj. Cuando arme la parte mecanica saco fotos y las subo. Voy muy lento con todo el proyecto porque (por suerte) me salio un monton de trabajo y tenia todo esto bastante olvidado.
Desde ya muchas gracias.
Saludos
Desde ya muchas gracias.
Saludos
Daniele, como estas? hace mucho que soy seguidor del foro pero creo que es primera vez que posteo algo...
Estoy haciendo un proyecto para la facultad, un autito (carrito) robotico que tiene que levantar y depositar objetos... Especificamente necesito de tu ayuda para la parte de la "depositacion", te cuento lo que necesito:
Voy a utilizar un servo motor de radio control, como el que usaste vos, y necesito que haga algo muy similar: que al recibir la señal de un sensor avance hasta cierto angulo (empujando el objeto) y que vuelva nuevamente a su posicion original (para empujar otro objeto con la siguiente señal del sensor)...
Creo que los circuitos que diseño Manuel51 pueden ser de utilidad; pero no entiendo como hacer lo siguiente:
- Como determino los angulos de las posiciones A y B?
- Como determino el tiempo que tendra cada movimiento?
Vi q este tema esta inactivo desde hace mucho tiempo, pero espero q puedan ayudarme... muchas gracias!
Estoy haciendo un proyecto para la facultad, un autito (carrito) robotico que tiene que levantar y depositar objetos... Especificamente necesito de tu ayuda para la parte de la "depositacion", te cuento lo que necesito:
Voy a utilizar un servo motor de radio control, como el que usaste vos, y necesito que haga algo muy similar: que al recibir la señal de un sensor avance hasta cierto angulo (empujando el objeto) y que vuelva nuevamente a su posicion original (para empujar otro objeto con la siguiente señal del sensor)...
Creo que los circuitos que diseño Manuel51 pueden ser de utilidad; pero no entiendo como hacer lo siguiente:
- Como determino los angulos de las posiciones A y B?
- Como determino el tiempo que tendra cada movimiento?
Vi q este tema esta inactivo desde hace mucho tiempo, pero espero q puedan ayudarme... muchas gracias!
Temas similares
- Respuestas
- 8
- Visitas
- 823
- Respuestas
- 7
- Visitas
- 692
- Respuestas
- 8
- Visitas
- 3K
- Respuestas
- 0
- Visitas
- 611