

Saludos D@rio, te cuento hasta donde tengo entendido el cmos es compatible con ttl solo que tienen que trabajar al mismo voltaje del que soporta el menos, el TTL. aunque por lo comun en el cmos es usado como interfase de salida para el TTL para acoplar distintos voltajes..
En cuanto a los contadores por lo general son flip flop en serie y de esta forma se obtienen los binarios..
En cuanto a el bdc de 7 segmentos espero que no hayan problemas, que la diferencia en cuando a su nomenclaturas tenga que ver con la tecnologia.
En cuanto a step es una señal de reloj que activa la sumatoria en las compuertas de los filp-flop internos del contador. En teoria se podrian reemplazar el contador con un flip flops... lo cual no es viable porque serian demasiados integrados..
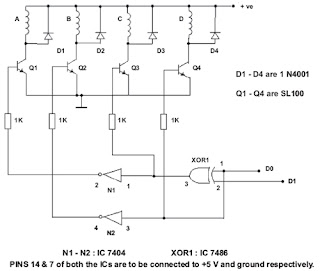
Para tu coleccion de circuitos, te dejo estas dos imagenes de circuitos para control de motores ambos son sencillos, seria cuestion de hacer el montaje a ver como funcionan, me llama la atencion el de los transistores con el uln 2003. creo que basicamente emulan la compuerta xor del otro circuito... es cuestion de experimentar...
Saludos y gracias.
En cuanto a los contadores por lo general son flip flop en serie y de esta forma se obtienen los binarios..
En cuanto a el bdc de 7 segmentos espero que no hayan problemas, que la diferencia en cuando a su nomenclaturas tenga que ver con la tecnologia.
En cuanto a step es una señal de reloj que activa la sumatoria en las compuertas de los filp-flop internos del contador. En teoria se podrian reemplazar el contador con un flip flops... lo cual no es viable porque serian demasiados integrados..
Para tu coleccion de circuitos, te dejo estas dos imagenes de circuitos para control de motores ambos son sencillos, seria cuestion de hacer el montaje a ver como funcionan, me llama la atencion el de los transistores con el uln 2003. creo que basicamente emulan la compuerta xor del otro circuito... es cuestion de experimentar...
Saludos y gracias.
Última edición:
