Hola amigos
Me acabo de comprar una impresora 3D, la Creality Ender 5 Plus. Porque este hilo aquí?
Hace ya mas de 7 años que me regalaron en una ferie aquí en Munich la placa stepRocker de la empresa Trinamic. Trinamic, a diferencia de lo que gigantes como Ti hacen. crea un controlador con las funciones de control de motores de Paso. Los otros ofertan soluciones avanzadas para el control de paso ejecutando programmas en su componente. Seriamente, no encontré otra empresa que ofrecía una solución avanzada para el control de motores de paso. Porque yo al principio de mi carrera profesional usaba un entonces famoso controlador gráfico, el m7720 de NEC, el camino tomado por Trinamic me convenció. Tanto, que reflexionando sobre lo que iba aprendiendo en mis experimentos usando la placa stepRocker y mas tarde la placa motionCookie que nunca llego a ser ofrecida en serie me decidí entonces, eso hace 7 años a usar un motor de paso como winche para el control de la vela en mi modelo de velero.
Hoy, estudiando la meteria de impresión 3D, especial foco en la hardware por no tener aún una impresora en mi poder me resaltó el producto que hoy domina una función esencial en las impresoras 3D, el control de motores de paso, pero también otras funciones que los SilentStepStick con la componente de Trinamic hacen posible.

Estas placas son usadas entre 4 a 6 veces con difusor de calor montado encima en las placas madre de las impresoras 3D. Todas esas avansadizimas funciones que Trinamic creo para operar un motor de paso así están disponibles para cada motor de paso controlado por la placa madre de la impresora.
Este video en Youtube muestra de forma racional, objetiva, competente y sumamente informativa los elementos de una impresora 3D y como estos pueden mejorarse usando los diversos elementos que presenta. Lo que me gusta mucho del estilo es que siempre crea un objeto de impresión 3D en su estado original y uno con la mejoara instalada mostrando si hay una mejora o no, el proque y el como.
De mis tiempos hace 7 años, en lo que fue la base para lo que llamé un tutorial avanzado sobre motores de paso, el operar un motor de paso a una tensión en lo posible elevadísima y el efecto que esto tiene en el torque de un motor de paso. Para mi eso era un factor muy importante. Mi modelo del velero Carina usa 12 batterías de LiFePO4 lo que cuando estan cargadas empiezan proveyendo un voltaje de casi 40 VDC y cuando descargos al punto donde hay que recargar las baterás aún de 24 VDC. Los experimentos, de los cuales aquel video que muestra que velocidad máxima podía lograr un motor de paso operado a 24 VDC operado sin carga. Doy el enlace en mi tutorial avanzado sobre motores de paso aquí en el foro.
Hoy el tipo de SilentStepStick mas comúnmente usado es el TMC2208 y que se puede operar a 24 VDC. Las placas madre de 32 Bits mas potentes de conocimiento común, uan un ARM M3 con lo que la velocidad de operación esta limitada a 160 MHz. También existe, pero aún muy poco conocido una placa con el ARM M4 y que se opera a una velocidad un poco mas rápida, 168 MHz. Un ARM M4 se puede oprar a frecuencias superiores a los 220 MHz. La razón por la cual el controlador ARM M4 es solo operado a 168 MHz muy probablemente se debe a que el diseño de su placa actual no funciona establemente a frecuencias mayores a los 168 MHz El SilentStepStick TMC5601 que usa ese controlador de Trinamic es aquel actualmente existente que de forma mas completa apoyo el uso de todas las funciones de control de motores de paso de Trinamic y en su versión mas avanzada. La placa con la cual viene im impresora 3D Creality Ender 5 Plus la usaré mientras desarrolle mis conocimientos de operar ese motor de paso. Y el tiempo trabaja en mi favor, pues la ardua competencia entre las empresas que ofrecen placas madre para impresoras 3D, los va a forzar a rediseñar sus placas madre para operar hasta el límite de velocidad especificado para el controlador ARM M4 que usan, mas de 220 MHz. Tambien el sistema operativo de las placas madre, llamado Merlin será actualizado por la amplia comunidad de sus ecosystema que basa en las ventajas de la licencia Open Source.
Vista de hoy al futuro de mi impresora 3D Ender 5 Plus:
Aún temprano en su evolución está el imprimir en multicolor, algo similar a lo que conocemos de pantallas gráficas, RGB. Imprimir en 3D multicolor será relativamente sencillo de implementar. El reto está en diseñas la unidad que combina 3 filamentos de color, los mezcla en las relaciones correspondientes al color que se quiere imprimir. Una vez eso sea realidad, los avances del sistema operacional Marlin ya habrá madurado. La otra cosa que aún no supiera predecir es la posibilidad de ampliar los materiales del filamento a usar y hacer facil el condicionar el entorno del volumen de impresión a adaptarse al filamento usado con mas facilidad de su uso y mas estabilidad. La otra cosa es de como implementar los elementos que convierten el material a su estado líquido, cosa que ya representa un reto cuando se en usan materiales menos comunes en los filamentos. Y finalmente el acelerar la velocidad de impresión sin deteriora de la calidad de los imprimido. El uso de SilentStepSticks como el TMC5160, el aumento del voltaje a valores tales como puede manejar el IC TMC5160, =< 50 VDC en combinación con placas madre usando el M4 o versiones mas actuales de los controladores ARM u otras versiones al lado de los ARM Mx. Muy relacionado a tal objetivo es el control del entorno en el cual se imprime. Ya bastante se logra mejorando los sistemas de ventilación. Pero la humedad ambiental, la temperatura de ese volumen se vuelven mas exigentes.
Vemos en la versión última de las impresoras de 3D de Creality, el Ender 6, qie la estructura de la impresora se le da paredes de plático transparente. Las reperciones de eso aún requieren ser mejor estudiadas y comunicadas y como consecuencia eventuales mecanismos adicionales para impactar de forma positiva ese entorno del volumen de impresión.
Me acabo de comprar una impresora 3D, la Creality Ender 5 Plus. Porque este hilo aquí?
Hace ya mas de 7 años que me regalaron en una ferie aquí en Munich la placa stepRocker de la empresa Trinamic. Trinamic, a diferencia de lo que gigantes como Ti hacen. crea un controlador con las funciones de control de motores de Paso. Los otros ofertan soluciones avanzadas para el control de paso ejecutando programmas en su componente. Seriamente, no encontré otra empresa que ofrecía una solución avanzada para el control de motores de paso. Porque yo al principio de mi carrera profesional usaba un entonces famoso controlador gráfico, el m7720 de NEC, el camino tomado por Trinamic me convenció. Tanto, que reflexionando sobre lo que iba aprendiendo en mis experimentos usando la placa stepRocker y mas tarde la placa motionCookie que nunca llego a ser ofrecida en serie me decidí entonces, eso hace 7 años a usar un motor de paso como winche para el control de la vela en mi modelo de velero.
Hoy, estudiando la meteria de impresión 3D, especial foco en la hardware por no tener aún una impresora en mi poder me resaltó el producto que hoy domina una función esencial en las impresoras 3D, el control de motores de paso, pero también otras funciones que los SilentStepStick con la componente de Trinamic hacen posible.
Estas placas son usadas entre 4 a 6 veces con difusor de calor montado encima en las placas madre de las impresoras 3D. Todas esas avansadizimas funciones que Trinamic creo para operar un motor de paso así están disponibles para cada motor de paso controlado por la placa madre de la impresora.
Este video en Youtube muestra de forma racional, objetiva, competente y sumamente informativa los elementos de una impresora 3D y como estos pueden mejorarse usando los diversos elementos que presenta. Lo que me gusta mucho del estilo es que siempre crea un objeto de impresión 3D en su estado original y uno con la mejoara instalada mostrando si hay una mejora o no, el proque y el como.
De mis tiempos hace 7 años, en lo que fue la base para lo que llamé un tutorial avanzado sobre motores de paso, el operar un motor de paso a una tensión en lo posible elevadísima y el efecto que esto tiene en el torque de un motor de paso. Para mi eso era un factor muy importante. Mi modelo del velero Carina usa 12 batterías de LiFePO4 lo que cuando estan cargadas empiezan proveyendo un voltaje de casi 40 VDC y cuando descargos al punto donde hay que recargar las baterás aún de 24 VDC. Los experimentos, de los cuales aquel video que muestra que velocidad máxima podía lograr un motor de paso operado a 24 VDC operado sin carga. Doy el enlace en mi tutorial avanzado sobre motores de paso aquí en el foro.
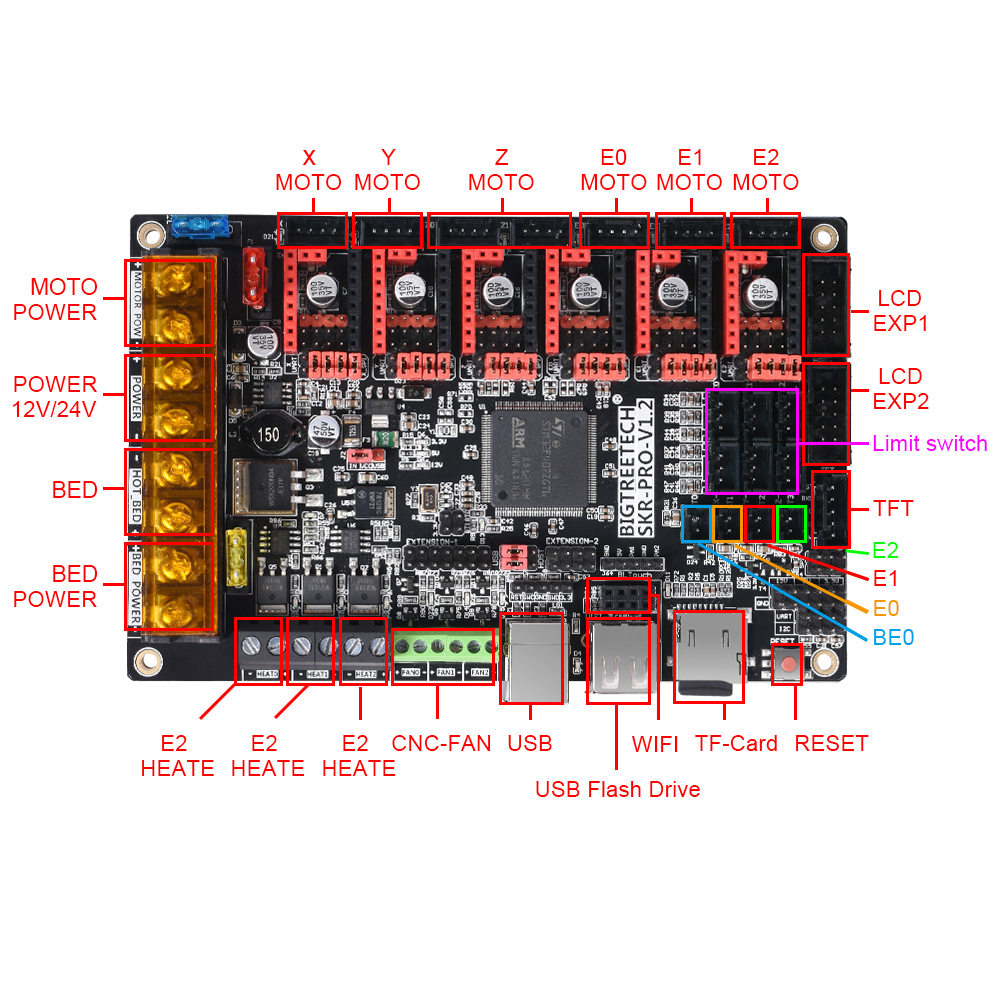
Hoy el tipo de SilentStepStick mas comúnmente usado es el TMC2208 y que se puede operar a 24 VDC. Las placas madre de 32 Bits mas potentes de conocimiento común, uan un ARM M3 con lo que la velocidad de operación esta limitada a 160 MHz. También existe, pero aún muy poco conocido una placa con el ARM M4 y que se opera a una velocidad un poco mas rápida, 168 MHz. Un ARM M4 se puede oprar a frecuencias superiores a los 220 MHz. La razón por la cual el controlador ARM M4 es solo operado a 168 MHz muy probablemente se debe a que el diseño de su placa actual no funciona establemente a frecuencias mayores a los 168 MHz El SilentStepStick TMC5601 que usa ese controlador de Trinamic es aquel actualmente existente que de forma mas completa apoyo el uso de todas las funciones de control de motores de paso de Trinamic y en su versión mas avanzada. La placa con la cual viene im impresora 3D Creality Ender 5 Plus la usaré mientras desarrolle mis conocimientos de operar ese motor de paso. Y el tiempo trabaja en mi favor, pues la ardua competencia entre las empresas que ofrecen placas madre para impresoras 3D, los va a forzar a rediseñar sus placas madre para operar hasta el límite de velocidad especificado para el controlador ARM M4 que usan, mas de 220 MHz. Tambien el sistema operativo de las placas madre, llamado Merlin será actualizado por la amplia comunidad de sus ecosystema que basa en las ventajas de la licencia Open Source.
Creativity Marlin 2.0 32-bit ARM Cortex-M4,6 color extruder motherboard program test for 3D printer
Vista de hoy al futuro de mi impresora 3D Ender 5 Plus:
Aún temprano en su evolución está el imprimir en multicolor, algo similar a lo que conocemos de pantallas gráficas, RGB. Imprimir en 3D multicolor será relativamente sencillo de implementar. El reto está en diseñas la unidad que combina 3 filamentos de color, los mezcla en las relaciones correspondientes al color que se quiere imprimir. Una vez eso sea realidad, los avances del sistema operacional Marlin ya habrá madurado. La otra cosa que aún no supiera predecir es la posibilidad de ampliar los materiales del filamento a usar y hacer facil el condicionar el entorno del volumen de impresión a adaptarse al filamento usado con mas facilidad de su uso y mas estabilidad. La otra cosa es de como implementar los elementos que convierten el material a su estado líquido, cosa que ya representa un reto cuando se en usan materiales menos comunes en los filamentos. Y finalmente el acelerar la velocidad de impresión sin deteriora de la calidad de los imprimido. El uso de SilentStepSticks como el TMC5160, el aumento del voltaje a valores tales como puede manejar el IC TMC5160, =< 50 VDC en combinación con placas madre usando el M4 o versiones mas actuales de los controladores ARM u otras versiones al lado de los ARM Mx. Muy relacionado a tal objetivo es el control del entorno en el cual se imprime. Ya bastante se logra mejorando los sistemas de ventilación. Pero la humedad ambiental, la temperatura de ese volumen se vuelven mas exigentes.
Vemos en la versión última de las impresoras de 3D de Creality, el Ender 6, qie la estructura de la impresora se le da paredes de plático transparente. Las reperciones de eso aún requieren ser mejor estudiadas y comunicadas y como consecuencia eventuales mecanismos adicionales para impactar de forma positiva ese entorno del volumen de impresión.