igualmente, los leds de alta luminosidad consumen(algunos) entre 2.4v y 3.2v, si en vez de usar 2 pilas comunes o alcalinas(1.5v+1.5v=3v) ocupo 2 pilas de niquel, osea recargables, tendria una tension total de 2.4v(1.2v+1.2v=2.4v) lo que me daria la tension exacta para alimentar los led con alguna resistencia pequeña en el medio.
PD: los LED rojos consumen entre 1.1v y 2.2v, si los alimento con 20mA(20mA para cada uno, serian 40mA ya que estan en paralelo(20+20=40)) deberia usar una resistencia de exactamente 10 Ohmios para obtener una tension de salida de aprox. 2v.
Ademas, teniendo en cuenta que quiero usar este circuito con pilas recargables AAA(1100 mA), tengo que conectar 5 en serie para poder alimentar los 2 motores(1.2v*5=6v) con esa cantidad tengo justo la misma cantidad que con 4 pilas alcalinas.
Cuando tenga tiempo voy a comprar los materiales(digo cuando tenga tiempo porque voy todos los dias doble escolaridad a la escuela), tal vez sea el Martes o el Miercoles...
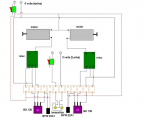
Me quedo una duda respecto a la conexion de los detectores de luz, que vos nombraste que tenia que ir a milimetros d la pista... me podrias dar una imagen o un dibujo de como tendria que quedar... con los LED o lamparas ya encendidas, es decir, donde deberia enfocar la luz del led y mas o menos a cuanta distancia tienen que estar los detectores de los transistores y de la luz de los led.
PD: que led me recomendarian: los que iluminan a un punto recto... o los que abarcan casi 180º para iluminar?
PD2: una manera de reducir los motores es conectarlos a 3v, en vez de a 6v?. Los que yo tengo(vibrador de joy de ps2) andan perfecto a 3v...
Teniendo en cueta que funcionan perfecto con 300mA, creo que si los voy a conectar a 3v, deberia usar una R=10 Ohm/1W(P=V.I ----> P=3v*0.3A=0.9W)
PD3: CON QUE LENGUAJE DE PIC ME RECOMIENDAN IRME FAMILIARIZANDO... C O ASSAMBLER?