Hola amigos, después de lo que a mí se me hizo una eternidad aparentemente ahora puedo empezar a dedicarme a lo concreto y a compartir mis esfuerzos, vaivenes consistiendo en logros y fallas.
Este hilo se va a dedicar a reportar paso-a-paso mis trabajos dentro del ámbito de mi sistema de control de escotas y de lograr una de los objetivos relacionados, el simular y verificar el control de escotas escribiendo este en el lenguaje de modelación "Modelica" usando como herramientas los productos "Mathematica y SystemModeler" de Wolfram. El Raspi es un sistema que la software de Wolfram apoya y hasta ofrece de forma gratuita para el Raspberry Pi, B+ o 2B su software Mathematica y su entorno y lengua de programación "Wolfram Language".
Para lograr este objetivo y limitándome al contexto de este hilo a temas relacionados al Raspi. Para ello, por un lado, tenía que avanzar mis trabajos relacionados a mi taller y en especial a mi laboratorio electrónico, cosa que describo en otro hilo.

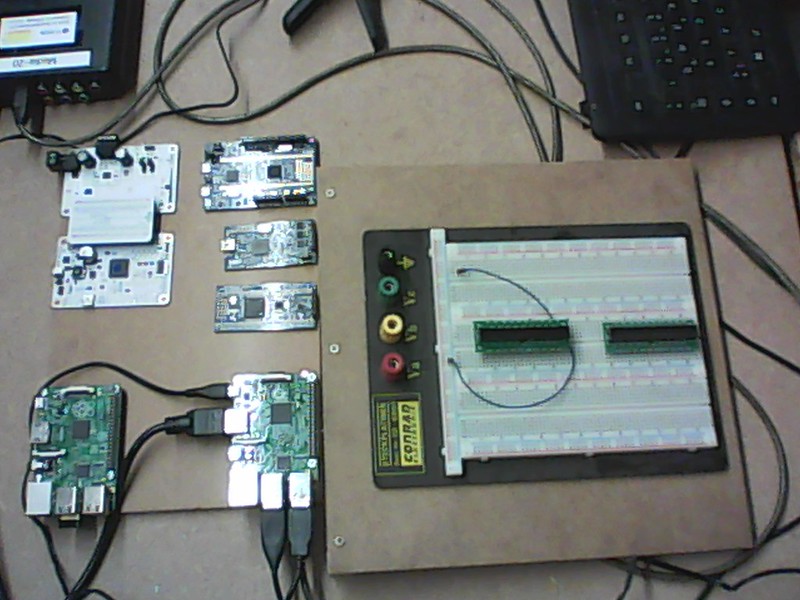
En esta foto tomada esta noche pueden ver la placa del RaspBerry Pi B+ montada en una placa de madera que iré poblando con otras placas en el transcurso de este hilo. También me compré la nueva RaspBerry Pi 2B por ser tan económica, pero empiezo con esta por si la llego a destruir durante mi aprendizaje! A la derecha ven el dispositivo que me armé con la protoboard y no mas para mostrar una placa que permite junto con un cable especial que también tengo los 40 pines del Raspi con el protoboard! Así puedo armar circuitos usando el protoboard y mantener la placa Raspi distante. estoy considerando comprarme un empaque transparente para la placa para así tenerla mas protegida.
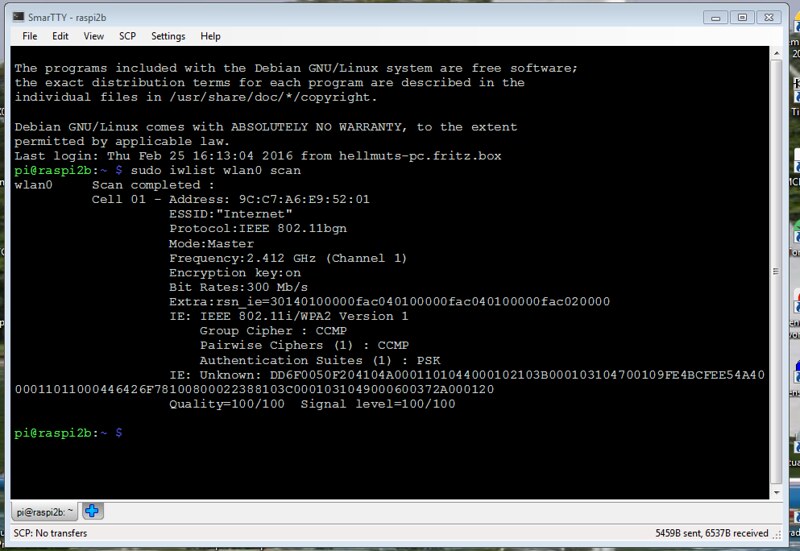
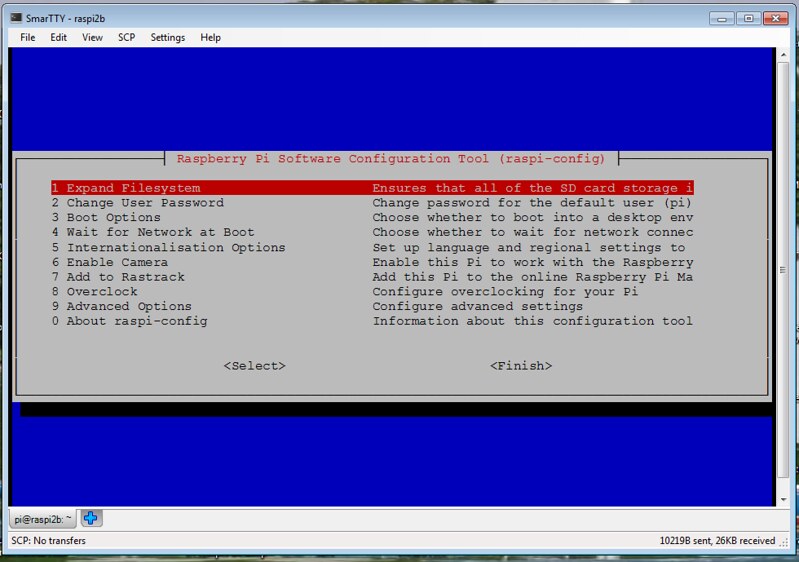
La instalación del sistema operacional Raspbian no la voy a describir en detalle pues la única posibilidad haciendo esto es hacerlo menos bien de la multitud de tutoriales disponibles en el Internet en general y en Youtube específicamente. Pero la instalación inicial que pueden apreciar en la pantalla usa la microSD NOOB de 8 GBytes, instalación que resulta en extremo sencilla. Raspbian se puede activar en uno de 2 modos, cada cual teniendo sus ventajas.
Aquella mas adecuada para la programación y los experimentos, al menos inicialmente es aquella no gráfica. Muestro aquí de como se ve esa interfaz pero usando ese modo dentro del ordenador y ejecutando la versión correspondiente de Python 3. Por eso en esta pantalla/ventana aparece la versión 3.5.1 de mi ordenador.
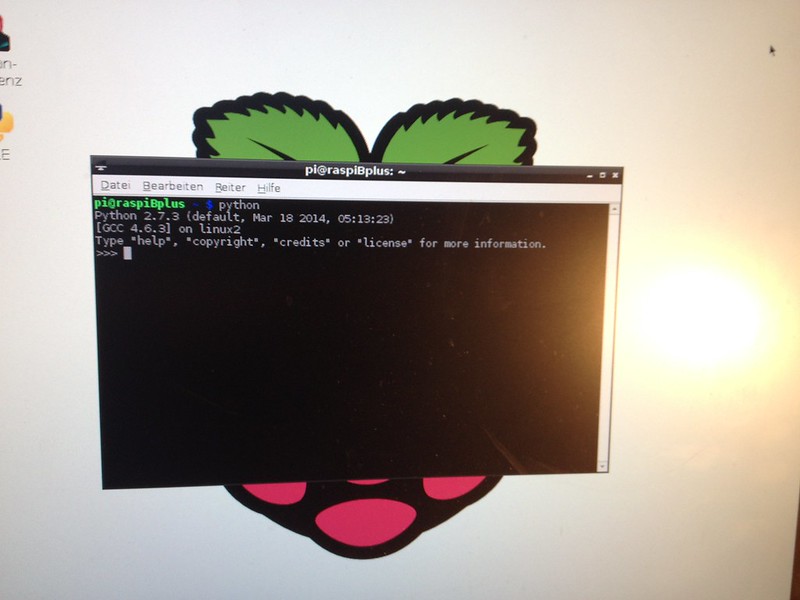
Con la instalación, partiendo de la microSD NOOB o descargando la imagen de NOOB del Internet, se instalan 2 versiones del lenguaje Python. Resulta que el lenguaje "Python" completamente compatible con el inmenso repertorio de software en el Internet es la vieja versión "2.x", siendo allí la versión actual instalada en la placa Raspi es la versión 2.7.3 y que ven en la vista "shell":
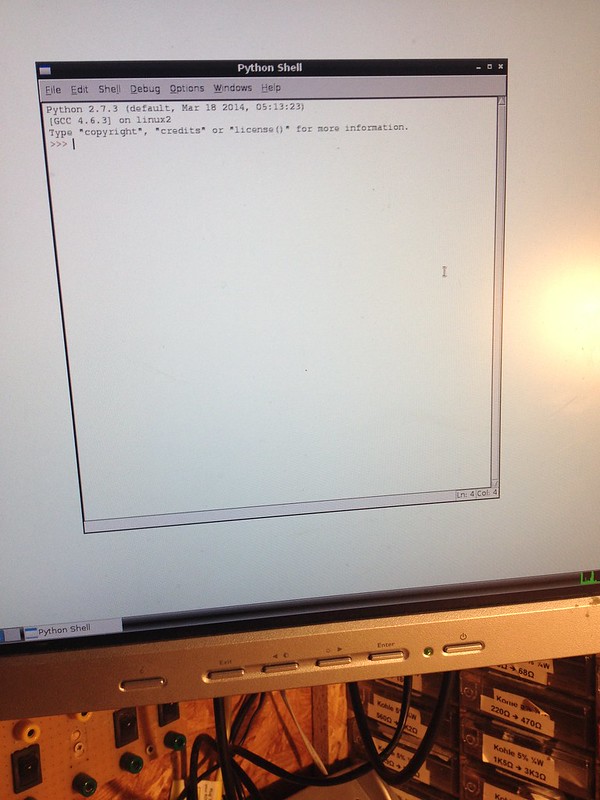
La misma versión de Python 2.7.3 pero en el entorno de Windows 7:
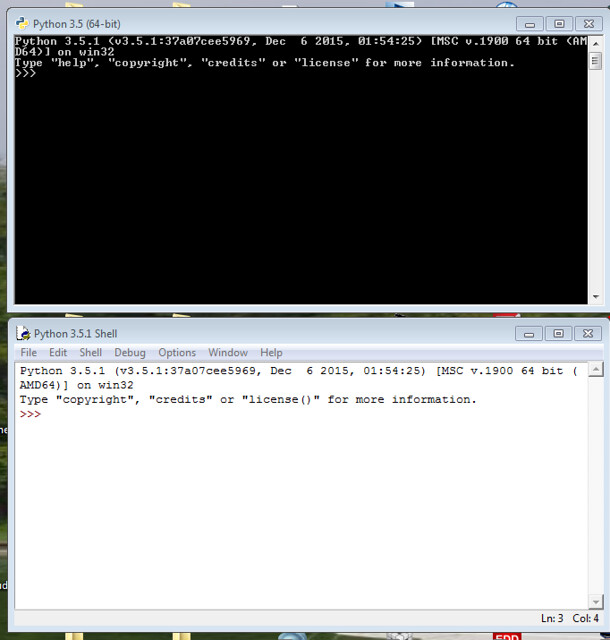
La nueva y más moderna versión 3.x y es en la cual me concentro en el ordenador bajo Windows 7 es la versión 3.5.1. Aquí una vez en la versión command line y en la versión IDLE:
Para el Raspi hice la actualización antes de decidirme por hacer este hilo por lo que solo puedo mostrar la versión ya actualizada 3.2.3 y que actualicé usando la siguiente sentencia en el raspi:
sudo apt-get install update Python3
En mi sistema algo no funcionó y tengo que entenderlo para saber que hacer. Sigo teniendo la version 3.2.3 y no la 3.3.
Otra cosa que he investigado es la posibilidad de escribir los códigos de mis programas en el ordenador y de tener ese entorno IDE dentro del ordenador, pero ejecutar los programas en la Raspi. Relacionado a esto está el deseo de también poder hacer el "debuging" dentro del entorno del PC pero el programa siendo ejecutado en la Raspi.
Buscando en el Internet y analizando para este propósito me encontré con el proveedor "Wingware" y me descargue la versión "Personal 5.1.9-1 (rev27910). hay que proceder como si se quisiera instalar la versión personal comprando la licencia y no la versión "Trial"! La versión descargada pinchando "Trial" me resulto en un archivo "zip" conteniendo un folder con todo y escribiendo que se pudiera sacar del "zip" a cualquier lugar en el disco duro y que no se requeriría una instalación. Pues bien, eso no funciona en el entorno de mi ordenador por la software de protección. Pero al iniciar la instalación de la versión "Personal" descargando como archivo "*.exe" permite activar el programa por 10 días de forma gratuita e indica la posibilidad de prolongar 2 veces para un total de 30 días! Vale la pena probarlo, pues el entorno del ordenador es bastante mas poderosa que lo que brinda la Raspi! ya iré contando mis experiencias!
Este hilo se va a dedicar a reportar paso-a-paso mis trabajos dentro del ámbito de mi sistema de control de escotas y de lograr una de los objetivos relacionados, el simular y verificar el control de escotas escribiendo este en el lenguaje de modelación "Modelica" usando como herramientas los productos "Mathematica y SystemModeler" de Wolfram. El Raspi es un sistema que la software de Wolfram apoya y hasta ofrece de forma gratuita para el Raspberry Pi, B+ o 2B su software Mathematica y su entorno y lengua de programación "Wolfram Language".
Para lograr este objetivo y limitándome al contexto de este hilo a temas relacionados al Raspi. Para ello, por un lado, tenía que avanzar mis trabajos relacionados a mi taller y en especial a mi laboratorio electrónico, cosa que describo en otro hilo.
En esta foto tomada esta noche pueden ver la placa del RaspBerry Pi B+ montada en una placa de madera que iré poblando con otras placas en el transcurso de este hilo. También me compré la nueva RaspBerry Pi 2B por ser tan económica, pero empiezo con esta por si la llego a destruir durante mi aprendizaje! A la derecha ven el dispositivo que me armé con la protoboard y no mas para mostrar una placa que permite junto con un cable especial que también tengo los 40 pines del Raspi con el protoboard! Así puedo armar circuitos usando el protoboard y mantener la placa Raspi distante. estoy considerando comprarme un empaque transparente para la placa para así tenerla mas protegida.
La instalación del sistema operacional Raspbian no la voy a describir en detalle pues la única posibilidad haciendo esto es hacerlo menos bien de la multitud de tutoriales disponibles en el Internet en general y en Youtube específicamente. Pero la instalación inicial que pueden apreciar en la pantalla usa la microSD NOOB de 8 GBytes, instalación que resulta en extremo sencilla. Raspbian se puede activar en uno de 2 modos, cada cual teniendo sus ventajas.
Aquella mas adecuada para la programación y los experimentos, al menos inicialmente es aquella no gráfica. Muestro aquí de como se ve esa interfaz pero usando ese modo dentro del ordenador y ejecutando la versión correspondiente de Python 3. Por eso en esta pantalla/ventana aparece la versión 3.5.1 de mi ordenador.
Con la instalación, partiendo de la microSD NOOB o descargando la imagen de NOOB del Internet, se instalan 2 versiones del lenguaje Python. Resulta que el lenguaje "Python" completamente compatible con el inmenso repertorio de software en el Internet es la vieja versión "2.x", siendo allí la versión actual instalada en la placa Raspi es la versión 2.7.3 y que ven en la vista "shell":
La misma versión de Python 2.7.3 pero en el entorno de Windows 7:
La nueva y más moderna versión 3.x y es en la cual me concentro en el ordenador bajo Windows 7 es la versión 3.5.1. Aquí una vez en la versión command line y en la versión IDLE:
Para el Raspi hice la actualización antes de decidirme por hacer este hilo por lo que solo puedo mostrar la versión ya actualizada 3.2.3 y que actualicé usando la siguiente sentencia en el raspi:
sudo apt-get install update Python3
En mi sistema algo no funcionó y tengo que entenderlo para saber que hacer. Sigo teniendo la version 3.2.3 y no la 3.3.
Otra cosa que he investigado es la posibilidad de escribir los códigos de mis programas en el ordenador y de tener ese entorno IDE dentro del ordenador, pero ejecutar los programas en la Raspi. Relacionado a esto está el deseo de también poder hacer el "debuging" dentro del entorno del PC pero el programa siendo ejecutado en la Raspi.
Buscando en el Internet y analizando para este propósito me encontré con el proveedor "Wingware" y me descargue la versión "Personal 5.1.9-1 (rev27910). hay que proceder como si se quisiera instalar la versión personal comprando la licencia y no la versión "Trial"! La versión descargada pinchando "Trial" me resulto en un archivo "zip" conteniendo un folder con todo y escribiendo que se pudiera sacar del "zip" a cualquier lugar en el disco duro y que no se requeriría una instalación. Pues bien, eso no funciona en el entorno de mi ordenador por la software de protección. Pero al iniciar la instalación de la versión "Personal" descargando como archivo "*.exe" permite activar el programa por 10 días de forma gratuita e indica la posibilidad de prolongar 2 veces para un total de 30 días! Vale la pena probarlo, pues el entorno del ordenador es bastante mas poderosa que lo que brinda la Raspi! ya iré contando mis experiencias!




") ^2+C, donde C mapeaba la imagen de origen en el círculo de radio 1, y la imagen de salida se mapeaba en función de los valores de escape (o mejor dicho como de lejos quedaba el punto de escape pasadas X iteraciones), normalmente en ese mapa, en las vecindades de cada cero de la función iterada (para saber el cero en X iteraciones lo sencillo era deshacer la iteración en n pasos y calcular los ceros del polinomio resultante) normalmente se encuentra un subconjunto de "mandelbrot", pero al estar las coordenadas originales mapeadas con la imagen de inicio en el interior de cada subconjunto aparecía la imagen inicial repetida, girada y mayor o menor mente deformada. Fue un resultado curioso.
^2+C, donde C mapeaba la imagen de origen en el círculo de radio 1, y la imagen de salida se mapeaba en función de los valores de escape (o mejor dicho como de lejos quedaba el punto de escape pasadas X iteraciones), normalmente en ese mapa, en las vecindades de cada cero de la función iterada (para saber el cero en X iteraciones lo sencillo era deshacer la iteración en n pasos y calcular los ceros del polinomio resultante) normalmente se encuentra un subconjunto de "mandelbrot", pero al estar las coordenadas originales mapeadas con la imagen de inicio en el interior de cada subconjunto aparecía la imagen inicial repetida, girada y mayor o menor mente deformada. Fue un resultado curioso.