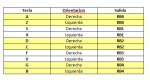
Darkbytes con tu código puedo mover cualquier servo de las salidas del pic (RB0, RB1, RB2, RB3, RB4), es decir controlar el brazo robotico con el teclado como si fuese un joystic?
PD: Igualmente te dejo una tabla de las teclas y lo que hará cada una.
Ademas por cierto veo un error en el codigo que me dejastes amigo.
Saludos.
Antes que nada quiero aclarar que no es mi código, es el que tu adjuntaste.
Yo solamente le hice unas modificaciones.
Donde mencionas que se cierra el puerto, no lo cierra, ni es un error, al contrario, lo evita.
Lo que se hace al deshabilitar el Command1, es que se evite que se pueda volver a presionar,
cuando el puerto este abierto, pero no cierra la comunicación con el puerto.
No es lo mismo el evento Click que la propiedad Enabled
Para cerrar la comunicación con el puerto se hace con MSComm1.PortOpen = False
Y si, si se pueden controlar los puertos de un PIC con un programa de VB6,
o un PIC puede controlar un programa de VB6.
;****************************************************************
Me puse a buscar información acerca de como controlar un joystick con VB6
y si hay manera, utilizando funciones especificas con las API de Windows.
Pero así como lo estas haciendo con el teclado también se puede.
Si requieres más información acerca de una interfaz en VB6, mira este enlace.
[Aporte] Interfaz RS232 PIC PC (Proyecto Completo VB6)
Tiene varios ejemplos usando el puerto serial de la PC.
Suerte y hasta luego.



")