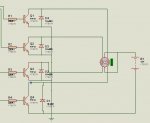
hola esta es una forma de colocar los diodos en un motor PaP
se supone que los diodos actuan como diodos de marcha , bla bla, bla ,teoria ,etc.
aunque no son necesarios para mover un motor a pasos o un simple motor DC.
si es importante que los lleve cuando el motor se va a mover externamente a mano
ejemplo:
tengo un motor apasos conectado a una banda ,SI YO LO MUEVO nunca falta el MANOTAS que lo mueve por jugar y ahi es donde el circuito de control se ve comprometido a ser asecinado por el voltaje inverso
que genera el motor a pasos o motor de CD comun.
cuando estas seguro que un MANOTAS no estara presente y que no moveras ese motor de forma externa si puedes omitir los diodos, "para ahorrar circuito".
pero si el circuito estara propenso a ser movido no por uno si no por varios MANOTAS ahi forsosamente debe llevar diodos tipo diodos schottky. por que deben ser rapidos y que soporten una buena corriente
por que los 1n4148 se pueden volar cuando el motor es grande y genera picos inversos de bastante corriente.
pero si es para un proyecto escolar donde es un motor PaP calabaceron pues no hay tos y no le pongas diodods