

Hola amigos, investigando para encontrar informaciones sobre los controladores de la familia i.MXx de Freescale, hoy NXP he notado que me estoy enfrentando a controladores que resultan ser unos bichos cuyo uso resulta muy complejo para usar sus funcionalidades. La causa de esto es que se trata de controladores para el mercado de los carros. Hoy vemos carros cuyos sistemas de asistencia al conductor y de protección activa contra posibles accidentes ya se va a beneficiar de estos controladores nuevos. Pero, considerando que el desarrollo de sistemas en la industria automotriz empieza aproximadamente 5 años antes que estos sistemas aparezcan en productos en el mercado, los nuevos controladores apareciendo alrededor del fin del 2016 y durante el 2017 son para carros que van a salir al mercado en 2022 y posterior. Muy conocido son los esfuerzos de crear automóviles autónomos. Pero en la discusión general sobre el futuro de los sistemas de transportación drones autónomos, algunos hasta con la capacidad de volverse taxis aéreos:
y https://lilium.com/
Aquí los enlace al vídeo de la empresa Lilium Aviation y al sitio de esta empresa. El primer producto final será una versión de 5 plazas. La empresa tiene su central cerca de Munich y es un spin-off de la universidad técnica de Munich. El prototipo, aún una versión drone sin personas abordo demostró la realización de los objetivos. El vehículo se eleva y desciende de forma vertical usando un gran número de motores "jet" instalados en las alas. Una vez despegado cambia la dirección de su sistema de propulsión de vertical a horizontal manteniéndose en el aire gracias a sus alas. Esto le permite reducir el consumo de electricidad durante el vuelo en ruta a un valor equivalente a un carro de propulsión eléctrica. Su velocidad de viaje es de 300 km/h. Su uso inicial será en el transporte donde hoy se utilizan helicópteros como por ejemplo en Nueva York entre el aeropuerto a Manhattan permitiendo ofrecer este servicio a mitad del costo del vuelo en helicóptero. Se planea sacar este vehículo al mercado alrededor del tiempo del 2022.
Doy este ejemplo porque creo que muy claramente refleja que las demandas de funcionalidades de un controlador en vehículos son diferentes a lo que tenían que brindar controladores tradicionales. El kit de NXP "Multisensoric enablement Kit",

muestra de forma que considero refleja lo escrito anteriormente de forma muy evidente!
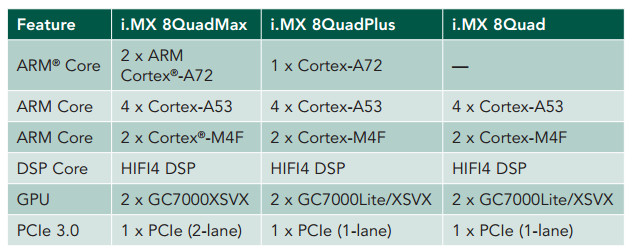
Si miramos en la tabla que muestra las funcionalidades incorporadas en los 3 miembros de la familia i.mx8 anunciada podemos ganar una impresión de la riqueza de recursos en estos controladores y lo complejo que se vuelve si se quiere concebir una aplicación que se beneficie de estas funcionalidades! Concentrémosnos a ver con mas detalle el i.MX 8QuadMax. Los múltiples núcleos ARM Cortex A* requerirían tener una implementación o de Linux o de un sistemas operacional de tiempo real. Aparentemente NXP ha usado el RTOX QNX. El núcleo DSP HIFI4 DSP aparentemente es para implementar funcionalidades de audio tanto como generador de sonido como para procesar datos recibidos. La GPU, tiene 2 núcleos puede apoyar funcionalidades de inteligencia artificial, de funcionalidad gráfica avanzada incluyendo esto múltiples pantallas. Sobre los usos del PCIe 3.0 ni me pongo a pensar por no tener mayor idea sobre esto.
Otras empresas como Renesas y seguro que también Intel y otros van por la misma ruta! Las consecuencia para poder beneficiarse de estas funcionalidades por un lado son el requerimiento de extenso material de entrenamiento. En Mayo empiezan varios cursos gratuitos por Internet, cosa que confirma que el ofrecer los i.MX8 al público general esta por ocurrir en cualquier momento:
Cursos
Por otro lado estas extensa variedad de funcionalidades también requiere de NXP ofrecer implementaciones gratuitas de programas que hagan estas funcionalidades accesibles a un público mas amplio y para reducir al máximo el tiempo de aprendizaje e implementación. Un producto tan complejo como este y que ha sido definido con el mercado automotriz en mente requiere de tener disponibles extensos recursos humanos para apoyar a clientes del mercado automotriz. Extender el mercado de tales productos a otros campos tendrá que balancear entre el tamaño del mercado adicional y el requerimiento de recursos de apoyo. Pienso que esta es la razón por la cual en una fase inicial Freescale se limitó a hacer posible el acceso a estos productos a una selección muy pequeña de grandes agentes del mercado automotriz. A pesar de esto el requerimiento de apoyo para estos "tier 1" llamados clientes de primera prioridad Freescale habrá que haber pospuesto el ampliar el número de clientes hasta muy recientemente cuando empresas "tier 2" han empezado a publicar el haber iniciado sus actividades para incluir nuevos productos con los controladores i.MX8. Mis actividades de mantener mi mirada a este mercado del i.mx8 han visto publicaciones tales. Estos proveedores ya están experimentados en el uso de controladores i.MX6 y 7. Esto indica que sus necesidades de aprendizaje son mucho mas moderados de aquellos que no han usado los controladores de las 2 generaciones previas.
Tomando estos datos que he adquirido en mis investigaciones me parece que un controlador de la familia i.MX8 está muy por encima de mis capacidades. Hay una empresa que ofrece placas con el i.MX6 y 7 por solo 39 USDs por ejemplo. Me he registrado para ser informado apenas tengan un producto con controladores i.MX8. A tal precio no representa una inversión mayor de mis escasos recursos económicos. Lo que yo me espero al querer adquirir una placa con un controlador i.MX 8Quadmax es investigar y experimentar sin prioridad para mí las herramientas de programación, IDEs, las librerías disponibles, etcétera.
Como mis actividades en la electrónica son para realizar funcionalidades para mi modelo de en velero, el controlador i.MX 8QuadMax odría ser como la funcionalidad de una "central" en el modelo. Las múltiples cámaras que se ven en el Multisensoric Enablement Kit Podrían usarse para realizar una presencia virtual en el modelo muy real! Mi hijo por ejemplo acaba de comprarse un "headset" con la funcionalidad de "head-tracking". Si dentro de los ecosistemas que evolucionarán alrededor de controladores de la nueva generación comentadas aquí, me imagino que habra la software que permita tales implementaciones. Como yo soy lento entre otras por mis problemas de salud, tomará mucho tiempo para iniciar actividades en esta dirección y así el ecosistema podrá madurar!
Aquí los enlace al vídeo de la empresa Lilium Aviation y al sitio de esta empresa. El primer producto final será una versión de 5 plazas. La empresa tiene su central cerca de Munich y es un spin-off de la universidad técnica de Munich. El prototipo, aún una versión drone sin personas abordo demostró la realización de los objetivos. El vehículo se eleva y desciende de forma vertical usando un gran número de motores "jet" instalados en las alas. Una vez despegado cambia la dirección de su sistema de propulsión de vertical a horizontal manteniéndose en el aire gracias a sus alas. Esto le permite reducir el consumo de electricidad durante el vuelo en ruta a un valor equivalente a un carro de propulsión eléctrica. Su velocidad de viaje es de 300 km/h. Su uso inicial será en el transporte donde hoy se utilizan helicópteros como por ejemplo en Nueva York entre el aeropuerto a Manhattan permitiendo ofrecer este servicio a mitad del costo del vuelo en helicóptero. Se planea sacar este vehículo al mercado alrededor del tiempo del 2022.
Doy este ejemplo porque creo que muy claramente refleja que las demandas de funcionalidades de un controlador en vehículos son diferentes a lo que tenían que brindar controladores tradicionales. El kit de NXP "Multisensoric enablement Kit",
muestra de forma que considero refleja lo escrito anteriormente de forma muy evidente!
Si miramos en la tabla que muestra las funcionalidades incorporadas en los 3 miembros de la familia i.mx8 anunciada podemos ganar una impresión de la riqueza de recursos en estos controladores y lo complejo que se vuelve si se quiere concebir una aplicación que se beneficie de estas funcionalidades! Concentrémosnos a ver con mas detalle el i.MX 8QuadMax. Los múltiples núcleos ARM Cortex A* requerirían tener una implementación o de Linux o de un sistemas operacional de tiempo real. Aparentemente NXP ha usado el RTOX QNX. El núcleo DSP HIFI4 DSP aparentemente es para implementar funcionalidades de audio tanto como generador de sonido como para procesar datos recibidos. La GPU, tiene 2 núcleos puede apoyar funcionalidades de inteligencia artificial, de funcionalidad gráfica avanzada incluyendo esto múltiples pantallas. Sobre los usos del PCIe 3.0 ni me pongo a pensar por no tener mayor idea sobre esto.
Otras empresas como Renesas y seguro que también Intel y otros van por la misma ruta! Las consecuencia para poder beneficiarse de estas funcionalidades por un lado son el requerimiento de extenso material de entrenamiento. En Mayo empiezan varios cursos gratuitos por Internet, cosa que confirma que el ofrecer los i.MX8 al público general esta por ocurrir en cualquier momento:
Cursos
Por otro lado estas extensa variedad de funcionalidades también requiere de NXP ofrecer implementaciones gratuitas de programas que hagan estas funcionalidades accesibles a un público mas amplio y para reducir al máximo el tiempo de aprendizaje e implementación. Un producto tan complejo como este y que ha sido definido con el mercado automotriz en mente requiere de tener disponibles extensos recursos humanos para apoyar a clientes del mercado automotriz. Extender el mercado de tales productos a otros campos tendrá que balancear entre el tamaño del mercado adicional y el requerimiento de recursos de apoyo. Pienso que esta es la razón por la cual en una fase inicial Freescale se limitó a hacer posible el acceso a estos productos a una selección muy pequeña de grandes agentes del mercado automotriz. A pesar de esto el requerimiento de apoyo para estos "tier 1" llamados clientes de primera prioridad Freescale habrá que haber pospuesto el ampliar el número de clientes hasta muy recientemente cuando empresas "tier 2" han empezado a publicar el haber iniciado sus actividades para incluir nuevos productos con los controladores i.MX8. Mis actividades de mantener mi mirada a este mercado del i.mx8 han visto publicaciones tales. Estos proveedores ya están experimentados en el uso de controladores i.MX6 y 7. Esto indica que sus necesidades de aprendizaje son mucho mas moderados de aquellos que no han usado los controladores de las 2 generaciones previas.
Tomando estos datos que he adquirido en mis investigaciones me parece que un controlador de la familia i.MX8 está muy por encima de mis capacidades. Hay una empresa que ofrece placas con el i.MX6 y 7 por solo 39 USDs por ejemplo. Me he registrado para ser informado apenas tengan un producto con controladores i.MX8. A tal precio no representa una inversión mayor de mis escasos recursos económicos. Lo que yo me espero al querer adquirir una placa con un controlador i.MX 8Quadmax es investigar y experimentar sin prioridad para mí las herramientas de programación, IDEs, las librerías disponibles, etcétera.
Como mis actividades en la electrónica son para realizar funcionalidades para mi modelo de en velero, el controlador i.MX 8QuadMax odría ser como la funcionalidad de una "central" en el modelo. Las múltiples cámaras que se ven en el Multisensoric Enablement Kit Podrían usarse para realizar una presencia virtual en el modelo muy real! Mi hijo por ejemplo acaba de comprarse un "headset" con la funcionalidad de "head-tracking". Si dentro de los ecosistemas que evolucionarán alrededor de controladores de la nueva generación comentadas aquí, me imagino que habra la software que permita tales implementaciones. Como yo soy lento entre otras por mis problemas de salud, tomará mucho tiempo para iniciar actividades en esta dirección y así el ecosistema podrá madurar!