hola
les comparto un robot seguidor de linea sumergible el cual realice para una competencia realizada en mi universidad.
algunas caracteristicas:
tamaño
15cm de largo
12cm de ancho
4.5cm de alto
motoreductores de 540 rpm, 6v
3 baterias de nokia 1100 en serie
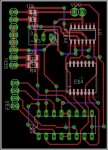
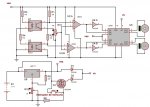
tiene un circuito basico utilizando amplificadores operacionales una compuerta inversora y un puente H l293d
si tiene alguna pregunta con gusto la respondere
les dejo el esquemático y algunas fotos y el video de la competencia
premio ganado una raspberry pi
les comparto un robot seguidor de linea sumergible el cual realice para una competencia realizada en mi universidad.
algunas caracteristicas:
tamaño
15cm de largo
12cm de ancho
4.5cm de alto
motoreductores de 540 rpm, 6v
3 baterias de nokia 1100 en serie
tiene un circuito basico utilizando amplificadores operacionales una compuerta inversora y un puente H l293d
si tiene alguna pregunta con gusto la respondere
les dejo el esquemático y algunas fotos y el video de la competencia
premio ganado una raspberry pi