Hola amigos hoy vengo a proponerles el seguidor de lineas mas simple que se me ocurrio , la verdad aun no lo monte pero acabo de hacer el diagrama , y en el livewire parece funcionar asi que se los comparto para que lo vean , mejoren , corrijan , monten o lo que quieran ! .
Basicamente funcionas asi:
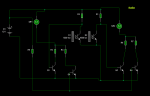
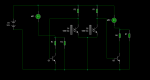
tenemos 2 fototransistores juntos (circulo gris) , y un LED que emite luz , esta se refleja en la linea blanca , y es recibida por los foto transistores .ahora los 2 motores estan andando con una resistencia de 100 ohm , y son activados a traves 1 transistor cada uno , ahora cuando la linea dobla para un lado , el fototransistor opuesto , no recibe ninguna luz por ende aumenta su resistencia , y el divisor de tension formado por este , con la resistencia aumenta la tension en el punto medio , de esta manera el segundo transistor se "activa" y hace que la resistencia total que esta en serie con el motor sea de la mitad 50 ohm , por regla de asociacion se resistencias en paralelo , y asi el motor duplica su velocidad , y como el otro la mantiene el robot gira hasta que ambos fototransistores reciban luz , es decir hasta que se acomode con la linea , no se si me exorese bien tal vez en el diargrama quede mas claro.
Les aclaro de nuevo yo no lo probre solo lo diseñe y en el livewire y en mi cabeza funciona , al que lo pruebe bienvenidos sus comentarios acerca de ello , aun le faltan mejoras como para cuando se cruzen 2 lineas , etc. Pero les traigo esta base para el que quiera partir de algo economico .Desde ya muchas Gracias por leer esto , y suerte!
funciona , al que lo pruebe bienvenidos sus comentarios acerca de ello , aun le faltan mejoras como para cuando se cruzen 2 lineas , etc. Pero les traigo esta base para el que quiera partir de algo economico .Desde ya muchas Gracias por leer esto , y suerte!
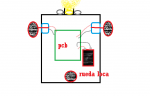
PD:tambien subo una idea del diseño del robot .
Basicamente funcionas asi:
tenemos 2 fototransistores juntos (circulo gris) , y un LED que emite luz , esta se refleja en la linea blanca , y es recibida por los foto transistores .ahora los 2 motores estan andando con una resistencia de 100 ohm , y son activados a traves 1 transistor cada uno , ahora cuando la linea dobla para un lado , el fototransistor opuesto , no recibe ninguna luz por ende aumenta su resistencia , y el divisor de tension formado por este , con la resistencia aumenta la tension en el punto medio , de esta manera el segundo transistor se "activa" y hace que la resistencia total que esta en serie con el motor sea de la mitad 50 ohm , por regla de asociacion se resistencias en paralelo , y asi el motor duplica su velocidad , y como el otro la mantiene el robot gira hasta que ambos fototransistores reciban luz , es decir hasta que se acomode con la linea , no se si me exorese bien tal vez en el diargrama quede mas claro.
Les aclaro de nuevo yo no lo probre solo lo diseñe y en el livewire y en mi cabeza
funciona , al que lo pruebe bienvenidos sus comentarios acerca de ello , aun le faltan mejoras como para cuando se cruzen 2 lineas , etc. Pero les traigo esta base para el que quiera partir de algo economico .Desde ya muchas Gracias por leer esto , y suerte!PD:tambien subo una idea del diseño del robot .