Hola, espero puedan ayudarme. Tengo pensado hacer un sensor para garege; tuve la idea porque tengo algunos materiales electrónicos en casa (sobras del cole). Como tengo varios controles IR de la misma marca dañados (los diodos IR funcionan) pues pienso aprovecharlos.
La idea:
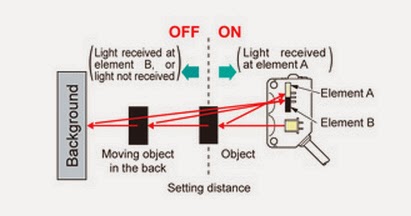
Mi garage es más o menos así (imagen 01); como el auto queda debajo del motor eléctrico de esa manera, pensé en implementar un sensor IR de barrera (reflexión) para detectar el capó a cierta distancia (menos de 1.5m).
Dudas:
Eh probado los controles IR (buenos) con mis televisores, cambiando canales en habitaciones paralelas, así que la idea no es tan descabellada. El problema es que no conozco el modelo de los diodos IR de los controles.
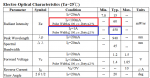
Revisando varios modelos de diodos en “San Google” note que la mayoría tiene las mismas características eléctricas (imagen 2). Ahora, tengo entendido que, para tener mayor alcance con los diodos, la corriente IFM debe ser mayor de 20mA, y para no quemar el diodo, el tiempo de trabajo debe ser muy pequeño, así como lo indica la datasheet.
/// ¿Qué tan cierto es eso? ///
En algunas páginas observo que utilizan frecuencias menores a la que se indica, por ejemplo:
https://www.inventable.eu/2015/01/19/barrera-infrarroja/
Gracias por su tiempo...
La idea:
Mi garage es más o menos así (imagen 01); como el auto queda debajo del motor eléctrico de esa manera, pensé en implementar un sensor IR de barrera (reflexión) para detectar el capó a cierta distancia (menos de 1.5m).
Dudas:
Eh probado los controles IR (buenos) con mis televisores, cambiando canales en habitaciones paralelas, así que la idea no es tan descabellada. El problema es que no conozco el modelo de los diodos IR de los controles.
Revisando varios modelos de diodos en “San Google” note que la mayoría tiene las mismas características eléctricas (imagen 2). Ahora, tengo entendido que, para tener mayor alcance con los diodos, la corriente IFM debe ser mayor de 20mA, y para no quemar el diodo, el tiempo de trabajo debe ser muy pequeño, así como lo indica la datasheet.
/// ¿Qué tan cierto es eso? ///
En algunas páginas observo que utilizan frecuencias menores a la que se indica, por ejemplo:
https://www.inventable.eu/2015/01/19/barrera-infrarroja/
Gracias por su tiempo...
Adjuntos

Última edición:
")