Mi primer post fue preguntando cosas, asi que les quiero aportar pruebas que hice por ahi a alguien le sirve.
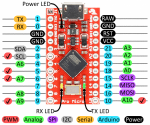
Esto es en lo que estoy ahora, haciendo pruebas, estoy usando un arduino Pro Micro (que es una onda leonardo pero en chiquito). Basicamente lo copado es que soporta HID (puse OTG pero bien me aclararon Nuyel y Scooter que no era asi), lo que lo deja hacer mil cosas con mouses, teclados, joysticks, a comparacion del arduino uno que (basicamente) no lo soporta.
La idea es que me serviria para hacer un seguimiento de un robotito con ruedas que tiene que escapar de un laberinto, ya que los motores no siempre andan a la misma velocidad y un largo etc, necesitas una manera de que sigan una linea recta.
Esto mas 3 sensores de ultrasonidos (dos para los costados para mantenerlo alineado a la pared, y uno adelante para ver cuanto le falta para chocar contra la pared), deberia servirle para escapar del laberinto.
Con el Arduino UNO no funciona (ver primer imagen)
Con el Arduino Pro Micro (y creo que cualquier arduino compatible con leonardo) funciona (ver la segunda y tercera imagen de abajo). El tema es que soporte OTG (en realidad no es exactamente OTG, pero es mas o menos la idea).
Les aviso que van a tener problemas para hacerlo funcionar, a veces no les va a detectar el arduino hasta que quede andando bien.
Los codigos fueron obtenidos de este post en instructables (copiar y pegar en sus navegadores) instructables.com/id/Optical-Mouse-Odometer-for-Arduino-Robot/?comments=all#CHU8F1IIDCXE3L2
Esto es en lo que estoy ahora, haciendo pruebas, estoy usando un arduino Pro Micro (que es una onda leonardo pero en chiquito). Basicamente lo copado es que soporta HID (puse OTG pero bien me aclararon Nuyel y Scooter que no era asi), lo que lo deja hacer mil cosas con mouses, teclados, joysticks, a comparacion del arduino uno que (basicamente) no lo soporta.
La idea es que me serviria para hacer un seguimiento de un robotito con ruedas que tiene que escapar de un laberinto, ya que los motores no siempre andan a la misma velocidad y un largo etc, necesitas una manera de que sigan una linea recta.
Esto mas 3 sensores de ultrasonidos (dos para los costados para mantenerlo alineado a la pared, y uno adelante para ver cuanto le falta para chocar contra la pared), deberia servirle para escapar del laberinto.
Con el Arduino UNO no funciona (ver primer imagen)
Con el Arduino Pro Micro (y creo que cualquier arduino compatible con leonardo) funciona (ver la segunda y tercera imagen de abajo). El tema es que soporte OTG (en realidad no es exactamente OTG, pero es mas o menos la idea).
Les aviso que van a tener problemas para hacerlo funcionar, a veces no les va a detectar el arduino hasta que quede andando bien.
Los codigos fueron obtenidos de este post en instructables (copiar y pegar en sus navegadores) instructables.com/id/Optical-Mouse-Odometer-for-Arduino-Robot/?comments=all#CHU8F1IIDCXE3L2
Adjuntos



Última edición: