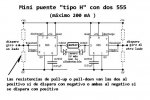
Lo de puente "tipo H" es solo a los efectos del buscador, ya que este circuito en realidad no lo es estrictamente, si bién sirve para controlar motores pequeños de cc, estilo los que abren y cierran las bandejas de CD.
No tiene la salida cero cero del puente H para motor detenido, pero como puede poner los dos bornes del motor a positivo o los dos a negativo, eso es motor detenido") , y además proteje contra doble órden de marcha que en un puente H convencional sería un cortocircuito y necesitaría protección.
, y además proteje contra doble órden de marcha que en un puente H convencional sería un cortocircuito y necesitaría protección.
Solo se usan los comparadores, el flip-flp y la salida. Y solo puede suministrar aproximadamente 200mA (ver hoja de datos del modelo a emplear).
Si se va a controlar con negativo , las dos resistencias pull-up irán al positivo, si se va a controlar con positivo , las dos resistencias pull down irán lógicamente al negativo.
Para un robot miniatura puede colocarse un integrado montado sobre el otro (sin impreso) soldar las patas que van juntas ... positivo con positivo (patas 8) negativo con negativo (patas 1) , reset con reset (patas 4) y con un mini cablecito juntarlo con el positivo, etc, etc y doblar hacia arriba las del integrado superior que no van juntas y hacer un "armado araña" en el aire por una cuestión de peso y espacio .
Los dos díodos zener en serie, puestos en paralelo con el motor, son para protejer de los cambios de giro intempestivos y deberán ser de uno o dos volts más que la alimentación.
Suerte
No tiene la salida cero cero del puente H para motor detenido, pero como puede poner los dos bornes del motor a positivo o los dos a negativo, eso es motor detenido
, y además proteje contra doble órden de marcha que en un puente H convencional sería un cortocircuito y necesitaría protección.Solo se usan los comparadores, el flip-flp y la salida. Y solo puede suministrar aproximadamente 200mA (ver hoja de datos del modelo a emplear).
Si se va a controlar con negativo , las dos resistencias pull-up irán al positivo, si se va a controlar con positivo , las dos resistencias pull down irán lógicamente al negativo.
Para un robot miniatura puede colocarse un integrado montado sobre el otro (sin impreso) soldar las patas que van juntas ... positivo con positivo (patas 8) negativo con negativo (patas 1) , reset con reset (patas 4) y con un mini cablecito juntarlo con el positivo, etc, etc y doblar hacia arriba las del integrado superior que no van juntas y hacer un "armado araña" en el aire
por una cuestión de peso y espacio .Los dos díodos zener en serie, puestos en paralelo con el motor, son para protejer de los cambios de giro intempestivos
y deberán ser de uno o dos volts más que la alimentación. Suerte