Hace poco compré este kit de desarrollo (LPC1768-Mini-DK2):
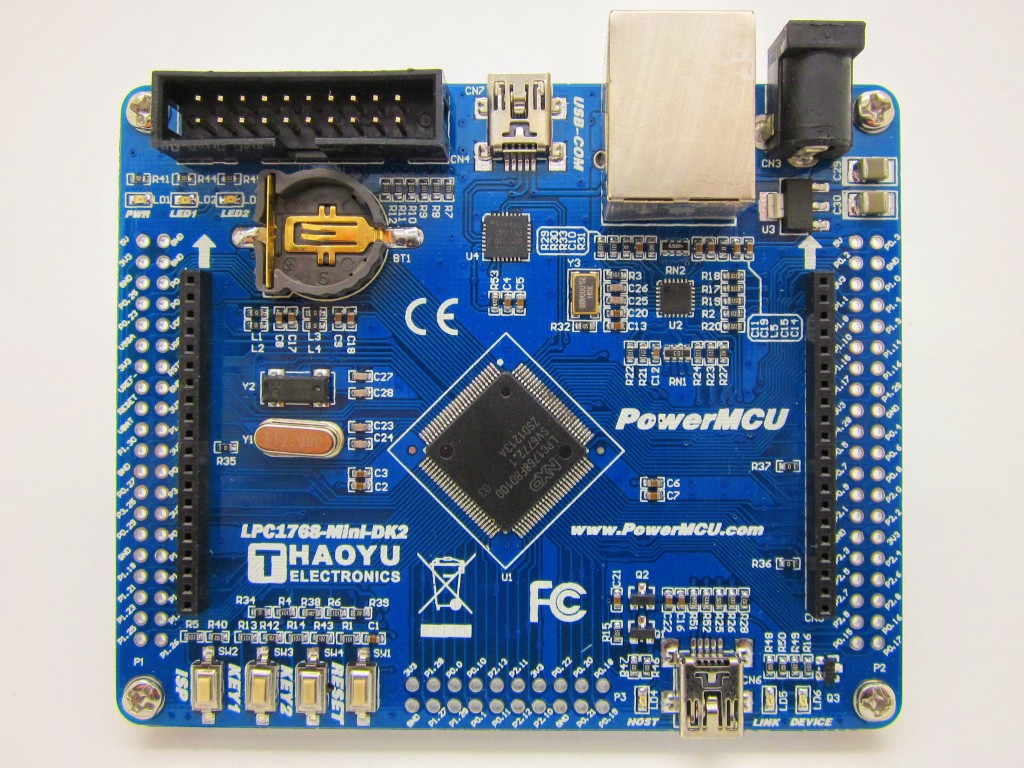
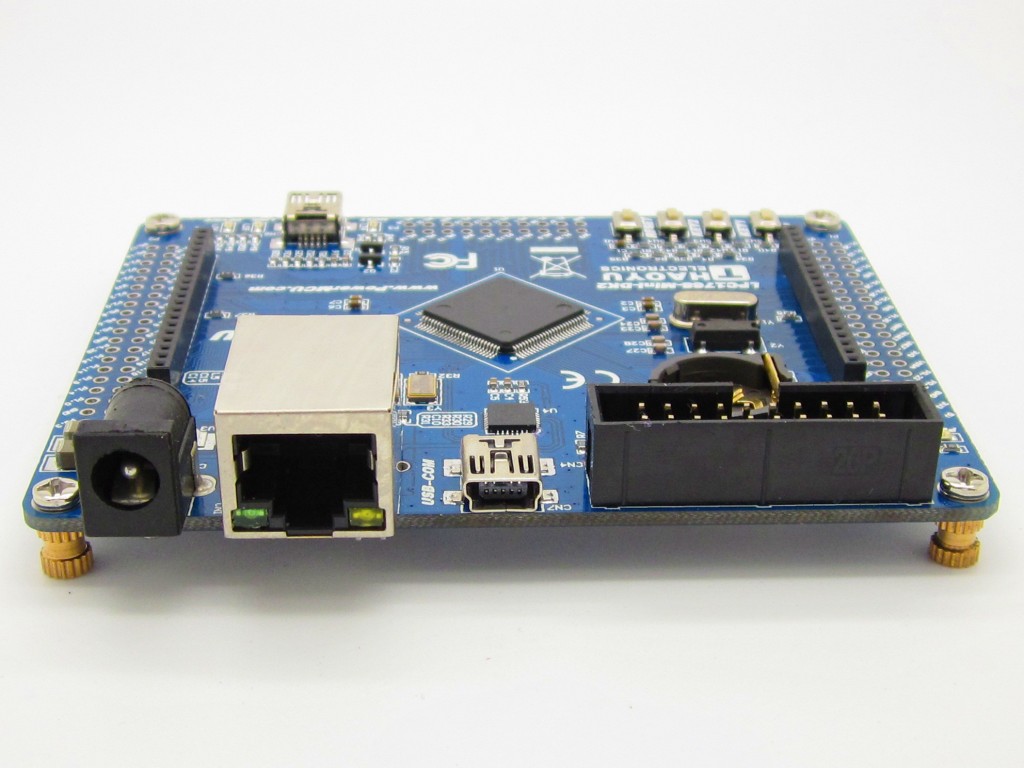
Las características del kit:
Realmente por las cosas que tiene, más que nada los puertos Usb y Ethernet (que todavía no llegué a verlos), y el costo del mismo (casi $200 argentinos o u$d 32) creo que vale la pena para explorar estos bichos que cada vez son más utilizados por su bajo costo y su alta prestación.
Yo venía de conocer los ARM7 y el cambio a esta familia realmente ni se nota, en casi todas las cosas es muy similar y solo cambian pequeños detalles haciendolos aún más sencillo a la hora de programar.
Esquemático:
El conversor usb a rs232, nos permite trabajar con la uart0 y poder programar el uC directamente desde un puerto usb. Obviamente además de este conector usb, se encuentra el puerto usb propiamente dicho del uC.
Siguiendo con la idea de este tutorial sobre ARM7, tenía pensado crear un mini tutorial más que nada orientado a código y ejemplos sobre los periféricos básicos que se pueden encontrar en estas familias de uC.
En base a eso, tenía planeado dividir el tutorial en varias partes las cuales ya tengo resueltas:
- GPIO.
- PLL y Timers.
- Interrupción externa.
- Uart.
- RTC.
- ADC.
- DAC.
- PWM.
- SPI y SSP (estos 2 últimos aún no pude probarlos con hard).
Nuevamente la idea es plantear un problema sencillo y resolver el código, para lo cual es fundamental tener la hoja de datos del LPC1768 a mano, con lo cual voy a dejarla en este post para que puedan descargarla.
En el próximo mensaje subo el equemático completo.
Las características del kit:
fabricante del kit dijo:- One serial interface, use CP2102 (USB to RS232 interface, support ISP download).
- RJ45-10/100M Ethernet network interface (Ethernet PHY: LAN8720A).
- 2.8 inch TFT color LCD interface (SPI interface or 16Bit parallel interface).
- USB 2.0 interface, USB host and USB Device interface.
- TF SD / MMC card (SPI) interface.
- Two user button, One Reset button and ISP button , one INT0 button, two user-programmable LED lights.
- Serial ISP download, Standard 20-pin JTAG download simulation debugging interface.
- Can be choose external 5V power supply or USB 5V supply.
- Board size: 95mm * 78mm.
- Expansion all IO.
Realmente por las cosas que tiene, más que nada los puertos Usb y Ethernet (que todavía no llegué a verlos), y el costo del mismo (casi $200 argentinos o u$d 32) creo que vale la pena para explorar estos bichos que cada vez son más utilizados por su bajo costo y su alta prestación.
Yo venía de conocer los ARM7 y el cambio a esta familia realmente ni se nota, en casi todas las cosas es muy similar y solo cambian pequeños detalles haciendolos aún más sencillo a la hora de programar.
Esquemático:
El conversor usb a rs232, nos permite trabajar con la uart0 y poder programar el uC directamente desde un puerto usb. Obviamente además de este conector usb, se encuentra el puerto usb propiamente dicho del uC.
Siguiendo con la idea de este tutorial sobre ARM7, tenía pensado crear un mini tutorial más que nada orientado a código y ejemplos sobre los periféricos básicos que se pueden encontrar en estas familias de uC.
En base a eso, tenía planeado dividir el tutorial en varias partes las cuales ya tengo resueltas:
- GPIO.
- PLL y Timers.
- Interrupción externa.
- Uart.
- RTC.
- ADC.
- DAC.
- PWM.
- SPI y SSP (estos 2 últimos aún no pude probarlos con hard).
Nuevamente la idea es plantear un problema sencillo y resolver el código, para lo cual es fundamental tener la hoja de datos del LPC1768 a mano, con lo cual voy a dejarla en este post para que puedan descargarla.
En el próximo mensaje subo el equemático completo.
Adjuntos
Última edición:
 ).
).