Apreciado heimmer, para realmente poderte ayudar el esquema de tu circuito tiene que mostrar a que pines conectas que! El resto es como leer en una bola de cristal! Los síntomas que describes parecen indicar a una alimentación inestable. De allí, que ciertas reglas de diseño son elementales para evitar el tratar de encontrar errores tipo difícil de reproducir de forma permanente!
1. Es recomendable separar de forma clara la alimentación eléctrica de circuitos digitales de aquellos de potencia. eso es equivalente del porque también hay que separa de forma clara la alimentación eléctrica para la funcionalidad análoga de la digital, razón por la cual microcontroladores tienen entradas de alimentación separadas para las partes del circuito digital, de aquellas de los circuitos análogos.
2. Hay que diferenciar entre una alimentación eléctrica estabilizada de una no estabilizada! Por tal razón yo uso en cada placa que hago por ejemplo un 7805 para crear una alimentación eléctrica estabilizada y así evitar problemas. Una fuente de alimentación como las que con seguridad tienes en tu casa a montón de equipos electrónicos que ya no usas da una alimentación no estabilizada. Por eso esa fuente debe dar una tensión superior a los 7VDC, mejor 9VDC, para que de allí el 7805 por ejemplo brinde la tensión estabilizada de 5VDC. Una tensión de 15 VDC no estabilizada por ejemplo causa mucho calor en el 7805, por lo que una tensión de 9VDc por ejemplo es preferible.
3. La fuente eléctrica para la alimentación del motor no require ser estabilizada, pero como se te ha indicado antes tiene que proveer la potencia adecuada. Si esta fuente es capaz de proveer el doble del amperaje que el motor de paso requiera como valor máximo, entonces esa fuente de potencia es adecuada para alimentar el motor de paso.
4. Existe un desentendimiento sobre los motores de paso en relación al voltaje que se les suministra. describo esto en mi tutorial avanzado sobre motores de paso! Los valores de tensión y amperaje indicados en la hoja de datos del motor o que sean indicados en una placa montada al motor se llaman valores nominales! El resultado de aplicar valores nominales a la alimentación eléctrica de un motor de paso no es buen criterio! Eso es algo en lo cual motores de paso son muy diferentes a motor DC por ejemplo! Miremos unos ejemplos para clarificar el tema:
Motor 1: 24 VDC, 1 Amperio!
La potencia nominal de tal motor de paso es:
P = V * I = 24VDC * 1A = 24W
Motor 2: 3VDC, 8A
P = V * I = 3VDC * 8A = 24W
Cual motor es mas potente? La respuesta de alguien que no sabe de motores de paso es que ambos motores tienen la misma potencia!
Mi respuesta: La potencia nominal de ambos motores es igual, pero la calidad de los motores y la potencia posible difiere muchísimo! Porque?
La mecánica y las bobinas en el motor 1 son de tal calidad reducida que si le aplicas mas de 1A de corriente el cableado de las bobinas se va a calentar, finalmente destruyendo el motor 1!
La mecánica y las bobinas en el motor 2 son tan superiores, que permiten el flujo de 8A de corriente!
Otro aspecto importante para comprender las implicaciones de los valores nominales de cualquier motor y por lo tanto también para motores de paso! sabemos, descrito por la ley de Ohm, que cuando mayor es la tensión que aplicamos a un circuito, mas es la corriente que va a fluir por este! Los valores nominales de un motor por lo tanto nos dicen, que si a este se le aplica la tensión nominal va a fluir el valor nominal de corriente! Si le aplicamos una tensión mayor a la nominal va a fluir un valor mayor de corriente que produce tal calentamiento del motor que este acaba dañandose! Continuemos con nuestra comparación de los 2 motores de arriba!
Asumamos que a ambos motores les vamos a aplicar la misma tensión de 24 VDC! Entonces sabemos que el motor 1 nos va a dar una potencia de 24W. Que ocurre con el motor 2 si le aplicamos directamente los 24VDC, como ocurre si controlando el L298, hacemos que cada bobina del motor de paso tenga esa tensión de 24VDC aplicada, lo único que controlamos son el puente H doble de cada bobina que permite definir la polaridad aplicada! la tensión esta 8x por encima del valor nominal de 3VDC, por la cual fluiría una corriente de 8 x 8A = 64A. El motor de paso muere quemándose!
Por tal razón un circuito para el control de un motor de paso no solo consiste de un L298, sino también de un L297! Que es lo que agrega de funcionalidad el L297 que evita que el motor de paso sea sometido a 64A de corriente, fuera de otros detallitos que describo en mi tutorial! El L297 tiene unos pines entre los cuales se conecta una resistencia. Dependiendo del valor de esta resistencia, la hoja de datos del L297 describe como seleccionar el valor adecuado de tal resistencia logrando de tal forma el L297, usando lo que se llama PWM, limitar el flujo de corriente a los 8A que máximo permite el motor 2 de forma continua! Que es el PWM? De forma simplificada es un switch que interrumpe el flujo de corriente de tal forma que solo pase la cantidad de corriente deseada. Digamos que el switch del PWM cuando tiene el valor "1", permite el libre flujo de corriente y cuando tiene el valor "0", lo interrumpe abriendo el circuito! Así, cuando el motor 2 le aplicamos 8 veces el valor de la tensión nominal, aquí los 24 VDC, entonces el PWM solo permitirá el flujo durante la octava parte del tiempo, así el promedio de corriente que fluye es de solo 8A! sabiendo esto, veamos que potencia nos brinda el motor 2 cuando le aplicamos los 24VDC y la corriente fluye solo la octava parte del tiempo!
P = V * I = 24VDC * 8A = 192W!
Claro que no es posible aumentar el valor de la tensión de potencia suministrada al motor de paso a cualquier valor altísimo para lograr mas potencia! Habrá un momento donde una tensión puede ser tan alta que la corriente salta como aro de chispas de un cable a otro causando un corto y dañando el motor. Por eso motores de paso bien documentados también indican hasta que tensión se les puede aplicar! Pero esto tiene un efecto colateral que explica porqué un forista comentando mi hilo del tutorial escibió muy correctamente que el conocía motores de paso, como aquel motor que se calienta anto que ya se había quemado el brazo!
Motores de paso son un tipo de motor maravilloso, pero exige entenderlos un poco para saber seleccionar el motor de paso adecuado y para definir los valores de alimentación eléctrica apropiados! existe algo que se llama pasos completos y que dependiendo del motor que se piense usar normalmente tiene un valor entre 8 y 200 pasos completos para hacer un giro de 360°. Pero también existe algo que se llama micropasos! Micropasos son pasos adicionales que el motor de paso hace durante un paso completo. El número de micropasos por paso completo puede tener un valor entre 2 y 1024 por ejemplo. Viejos circuitos como el de las componentes L297/L298 brindan un valor de 2 o 4 micropasos por paso completo. Si mi motor de paso da 200 pasos por giro completo y si usa 2 micropasos por paso completo, entonces mi motor dará 2 * 200 = 400 micropasos para un giro de 360°. Un circuito actual es capaz de dar 256 micropasos por paso completo de lo que resultan: 256 * 200 = 51.200 micropasos para un giro completo de 360°!
Porqué demonios esos micropasos y que beneficio brindan? Pues bien son 2 beneficios fundamentales que impactan la decisión cuando un motor de paso es adecuado para ser usado en una aplicación y cuando no!
1. Si uso por ejemplo 256 micropasos, entonces es posible parar el motor de paso en 51.200 posiciones angulares diferentes durante cada giro de 360°
2. El motor de paso funciona de forma mas estable cuando lo hago funcionar con 256 micropasos!
El beneficio "1" se explica a si mismo! Si requiero posicionar algo con mucha exactitud, entonces el motor de paso me ofrece una altísima resolución y me es posible girar a esa posición deseada puramente dando el número de micropasos requerido!
El beneficio "2" requiere de una explicación mas detallada:
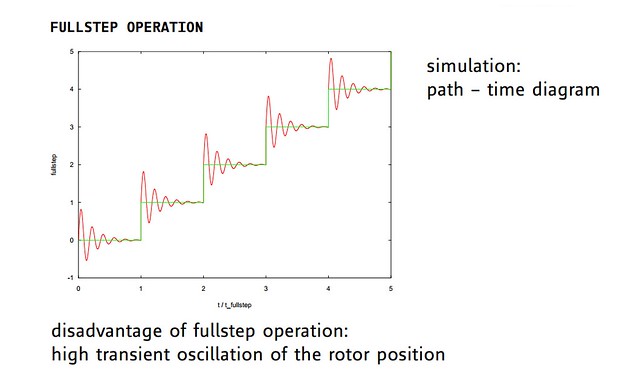
Vemos en este gráfico que uso con el permiso por escrito de la empresa Trinamic, que cuando un motor de paso está siendo operado solo con pasos completos el alto valor de cambio de tensión induce oscilaciones del valor de la tensión y por lo tanto también de la corriente que fluye por las bobinas!
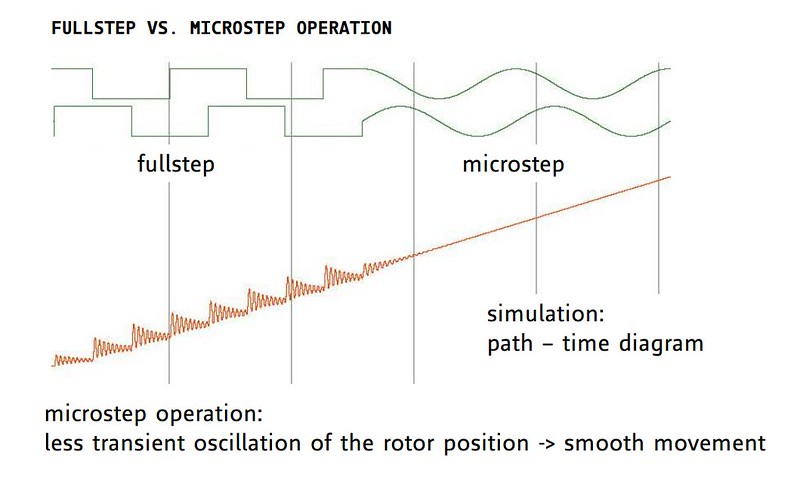
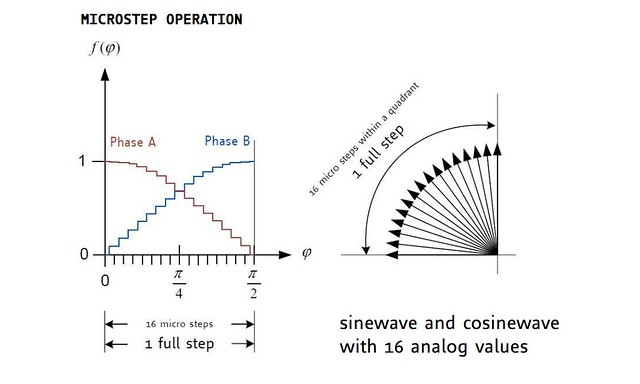
este segundo gráfico muestra las diferencias entre las 2 formas de operar un motor de paso. Sea solo con pasos completos o con micropasos! Vemos los grandes saltos que da la alimentación de las bobinas del motor de paso, comparado con la forma senoidal de la alimentación eléctrica cuando se dan micropasos. Lo que ocurre es que no se invierten la polaridad de la alimentación eléctrica, resultando en un cambio de tensión abrupto de 2x el valor de la tensión aplicada, en nuestro ejemplo del motor 2 con 24VDc, el cambio de tensión operando el motor de paso en pasos completos sería de 48VDC! La tensión va siendo alterada siguiendo valores que equivalen al cambio de valores siguiendo la curva senoidal. Aquí el gráfico que lo muestra:
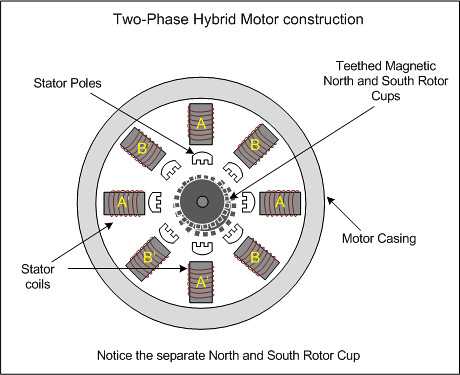
Este gráfico no esta totalmente correcto pero sirve para mi propósito! En realidad las bobinas y los magnetos permanentes no se encuentran el una exactamente al frente del otro, pero esto aquí facilita la explicación!
Como todos sabemos, polos iguales se rechazan, polos diferentes se atraen! Así dependiendo de la polaridad los magnetos permanentes en el centro buscarán alinearse al frente de una bobina que tenga la polaridad opuesta magnética. Así pues, si la corriente que fluye por la bobina varía de forma prácticamente continua, siempre será un ángulo diferente donde la parte rotativa en el centro se encuentre en la posición mas adecuada. Habiendo 256 diferentes valores de la corriente fluyendo por las bobinas, estas van a crear campos magnéticos de 256 diferentes fuerzas y así realizando los 256 micropasos por paso completo.
Ahora, cuando empecé a dedicarme a los motores de paso me compré una placa con las componentes L297 y L298 y en ebay un motor de paso. saben que, nunca funcionó y empecé a dudar de mis habilidades! Cuando me compre la placa "stepRocker" con las componentes de trinamic pude ver, que realmente el motor recién empezaba a funcionar con un número de micropasos superior al que es posible con aquella placa basada en el L298/L298!
Otra cosa bien molesta es el ruido y la vibración cuando se operan motores de paso. Los videos de mis experimentos pueden encontrarse en el tutorial.
Así pues apreciado heimann, vale meterse y estudiar un poco a fondo las materias para entender su funcionamiento! Pon el circuito completo y detallado y se podra investigar si has cometido algun error mayor!