


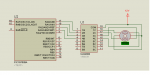
El proyecto consiste en un autito a control remoto, controlado con dos motores paso a paso extraídos de dos impresoras idénticas, tanto en el control remoto como en el autito se utilizan micros PIC16F628A y para la parte de control remoto se utilizan módulos RF, el modelo del emisor es: RT4 433,92 Mhz y del receptor es: RR3 433,92 Mhz, obviamente son compatibles entre ellos para comunicarse. Se utiliza la interfaz USART de los micros para la comunicación PIC-EMISOR y RECEPTOR-PIC
Bueno esto es a groso modo, adjunto una foto y les dejo dos link por si quieren ver los videos.
Si alguien quiere más detalles o está interesado en alguna parte especifica no dude en preguntar.
Saludos.
Bueno esto es a groso modo, adjunto una foto y les dejo dos link por si quieren ver los videos.
Si alguien quiere más detalles o está interesado en alguna parte especifica no dude en preguntar.
Saludos.
")