Permíteme tratar de ayudarte! la corriente de 800 mA es aquella corriente que el cableado de cada bobina soporta, algo válido de asumir como presentas!
Ahora permíteme resaltar otro aspecto!
La corriente de 800 mA resulta al aplicar una tensión de 6 VDC como también indicas correctamente! Asumamos que en vez de 6 VDC aplicas 30 VDC para lograr una potencia 5 veces mas alta que aquella que resulta aplicando los valores que nombras. La sencilla razón, la tensión es el factor 5 mas alta! Piremos la ecuación de potencia:
P = I * U siendo:
P la potencia en vatios [W]
I la corriente en amperios [A]
U la tensión en voltios [V]
Apliquemos los valores que pusiste y computaste con la ley de Ohm:
P = 0.8 A * 6 V = 4.8 W
Repitamos el ejercicio con la tensión de 30 VDC:
P = 0.8 A * 30 VDC = 24 W
24 W / 4.8 W = 5
La potencia posible es 5 veces mas alta!
Por eso seleccionamos un motor con un voltaje lo mas bajo posible, así la tensión que realmente aplicamos representa un factor mas alto y por lo tanto la potencia disponible es equivalentemente mas alta! repitamos los cómputos, ahora con una tensión nominal de 2 VDC en vez de los 6 VDC anteriores. La corriente continua pudiendo ser hasta de 0.8 A!
Espesamos aplicando la ley de Ohm:
R=2vdc/800ma = 3.125 ohmios
(uso to ecuación!)
Apliquemos los valores que pusiste y computaste con la ley de Ohm:
P = 0.8 A * 2 V = 1.6 W
Repitamos el ejercicio con la tensión de 30 VDC:
P = 0.8 A * 30 VDC = 24 W
24 W / 1.9 W = 15
La potencia posible es 15 veces mas alta!
Si, como es usual en el control de motores de paso la alimentación con corriente a las bobinas ocurre por PWM, los MosFET solo conducirían corriente durante la quinta parte del tiempo. El resultado es que a pesar que debido a la tensión aplicada de 30VDC y aplicando la ley de Ohm el flujo de corriente continua es de:
4A = 5 x 0.8A,
La corriente que fluye por las bobinas solo conduciendo un 20% del tiempo es de:
0.8A = 1/5 (30VDc / 7.5 ohmios) = 1/5 * 4A
Tomo este esfuerzo porque siempre veo y repito el ver que aquellos usuarios que no conocen de motores de paso escogen motores poco adecuados, o por decirlo de otra forma, ineficientes!
Aquí traté de demostrar que escogiendo un motor que nominalmente solo permite 6 VDC representa solo 1/3 de la potencia que sería posible solo escogiendo un motor de 2 VDC! resalto, ambos motores solo permiten la misma corriente de 0.8 A en un entorno idéntico, o sea con una fuente eléctrica de 30 VDC!
No hay magia en esto! Si la tensión es 10x mas alta que la nominal, una PWM que controla los MOSFETs solo permitirá el flujo durante el 10% del tiempo. Algo muy sencillo de programar!
Es mas, si se usa un controlador sencillisimo que comprado no cuesta mas que 1 USD, entonces ese también tiene un convertidor análogo digital, ADC! Si en el circuito de alimentación ponemos una resistencia de fracción de ohmio, los llaman "shunt" y de un vatiaje apropiado para los 0.8 A de los que hablábamos, es igualmente sencillo sacarle mas jugo al motor de paso moviéndose!
Escribía anteriormente que cuando las bobinas del motor hacen que este de sus pasos, entonces estas bobinas generan lo que se llama una tensión inducida de polaridad invertida reduciendo así el valor de la tensión efectiva de alimentación! Por simplicidad del cálculo asumo que el motor está haciendo sus pasos a tal frecuencia que la tensión inducida tiene el valor del 50% de la tensión aplicada por la fuente de alimentación eléctrica:
Uf [V] = 30 VDC valor suministrado por la fuente de alimentación!
Ui [V] = -15 [VDC] recuerda que es invertida!
Ue [V] = Uf [V] + Ui [V] = 30 VDC + (-15VDC) = 15 VDC
A la frecuencias de pasos del motor este ha perdido un 50% de su potencia!
Ue [V] / Uf [V] =15 VDC / 30 VDC = 0.5
Pero ahí viene lo interesante! Como la tensión Ue [V] es solo un 50%, la ley de Ohm nos da que la coriente que fluye por las bobinas en ese momento igualmente solo es un 50% si dejamos la PWM sin cambiar!
Al principio de este mensaje puse los 30 VDC en relación a los 6 VDC nominales del motor indicando que para limitar el flujo de la corriente a los 0.8 A máximos tolerables por el motor, el PWM que controla si los MOSFETS conducen o no solo permite el flujo durante un 20% del tiempo o 1/5! Si ahora habiendo medido con el ADC del controlador que la corriente solo alcanza un 50% del valor máximo permitido, que nos previene de alargar el tiempo que los MOSFETs conducen de 1/5 a 2/5 o un 40% del tiempo!
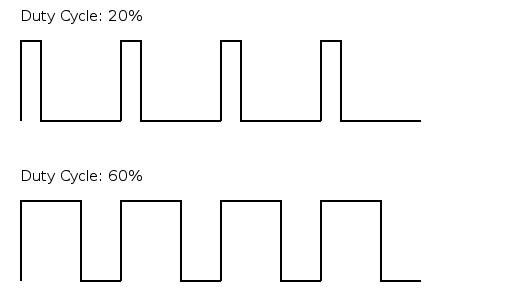
Para los novatos: Un PWM opera así:
"Duty Cycle" es la expresión en inglés del porcentaje del tiempo que la señal del PWM hace que el MOSFET conduzca! En el gráfico vemos ejemplo del 20% del 60%. Esa señal oscila a varios kHz de frecuencia
Asi logramos que el motor de paso pueda girar a velocidades mayores, respectivamente ofrecer mas torque a mayores velocidades!