isai : aquí te dejo el circuito seguidor de líneas más simple de construir (y uno de los más usados en el mundo de los pequeños autómatas).
Está basado en el CNY70, un sensor óptico reflexivo con salida a transistor. Como creo que eres estudiante y seguramente piensas armar esto como proyecto, te dejo esta url, la cual contiene un poco de literatura acerca del CNY70 y su principio de funcionamiento, asi como algunas curvas características.
http://autric.com/Microbotica y Mecatronica/cny70.htm
Seguidor de Líneas
En el esquema mostrado se puede apreciar como funciona el circuito, el led emisor del sensor CNY70 se alimenta a través de una resistencia R1 de 680 Ω, cuando una superficie reflectante como el color blanco de la superficie por donde se moverá el rastreador, refleja la luz del led emisor, el fototransistor contenido en el sensor CNY70 baja su resistencia interna entre Colector y Emisor con lo cual conduce la corriente que hace que también entre en conducción el transistor Q1 que estaba polarizado a masa por medio de la resistencia R2 de 10 KΩ. Q2 sirve para invertir la señal para que de este modo se desactive el motor cuando ve blanco y se ponga en marcha cuando ve negro el sensor, con lo que al activarse Q1 hace que se active Q2 cortando a Q3 con el, ya que este ultimo estaba activo porque esta polarizado por R3, con lo cual lo que a pasado es que la salida del motor se a desactivado cuando el sensor a detectado una superficie reflectante, en estado de reposo la salida estará siempre activa y Q3 conduciendo. Los 2 circuitos se pueden alimentar con 4 pilas normales de 1,5V puestas en serie con lo que se obtienen 6V, dependerá del consumo de los motores elegir pilas o baterías mas potentes.
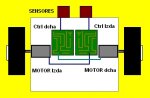
Montaje: El robot se compondrá de un circuito que podremos hacer fácilmente con una placa de prototipos o usando los fotolitos o cualquier método, y este tendrá dos circuitos exactamente iguales uno para cada sensor-motor e irán cruzados con lo que el sensor izquierdo actuara sobre el motor derecho y el sensor derecho sobre el motor izquierdo tal como se muestra en la ilustración.
Los motores tienen que ser de corriente continua y habrá que fabricarles una reductora si no disponen de ella para mover las ruedas, contra mas grandes sean las ruedas, mas velocidad alcanzara el robot, aunque no hay que pasarse con el diámetro de estas porque si no en las curvas se saldrá de trayectoria, unos 6 cm. es lo ideal.
Los sensores irán dispuestos mirando al suelo y a unos 2 o 3 mm de separación desde el suelo a la superficie del sensor y la separación entre ambos sensores será para que quede dentro de la línea negra que vayamos a usar como trayectoria. En mi montaje he utilizado dos servos trucados de manera que queden solo los motores CC con la reductora osea sin circuito de control pero se puede usar cualquier motor de CC de unos 5 o 6 voltios y que no consuma demasiado para no agotar las pilas o baterías demasiado deprisa. El trazado lo podremos hacer sobre una cartulina blanca y para trazar las líneas usar cinta aislante negra, tener cuidado en no hacer curvas demasiado cerradas ya que si el robot es muy veloz (ruedas grandes) se saldrá de la trayectoria por inercia y al sacar los 2 sensores fuera de la línea no volverá a entrar (recordemos que este sistema no es microcontrolado) por lo que haremos algunas pruebas antes de trazar el camino final.
Funcionamiento: Pondremos el robot en la superficie de fondo blanca y lo alimentaremos, como los dos sensores están activos los motores permanecerán parados, ahora empujaremos el robot hasta la línea de trayectoria negra, al entrar uno de los sensores con la línea negra este hará que el motor del lago contrario empiece a funcionar con lo que el robot entrara por si solo en la trayectoria, cuando tenga los dos sensores viendo negro los 2 motores estarán en marcha con lo que el robot avanzara en línea recta, ahora bien si el llega a una curva y supongamos que el sensor izquierdo sale de la línea negra entonces provocara que el motor del lado contrario (motor derecho) se desactiva con lo cual el robot girara a derecha (como un tanque) entrando de este modo en la línea negra otra vez... para el caso contrario pasa lo mismo pero con el otro motor y sensor.
Saludos.




 gracias
gracias