


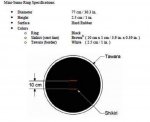
Para todos aquellos aficionados a las luchas de Robots Sumo, aquí dejo uno de tantos esquemas que se pudieran utilizar para hacer un montaje se un robot clase mini sumo del tipo básico; recordemos que sus dimensiones no deben exceder de 10 centímetros por lado y un peso total de 500 gramos.
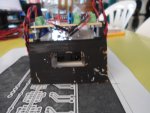
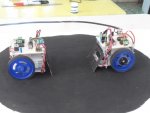
El presente mini sumo básico, consta de dos motorreductores de 1.4 kg, ruedas de 6 cms de diámetro, y tiene una altura de 86 milímetros.
Para el momento de las fotos y pruebas aún no se le han colocado lastres para hacerlos llegar a su máximo peso (estarán en "engorda", ya que les faltan 230 gramos aún).
La electrónica esta formada por dos simples LM358 en modo comparador para los sensores CNY70 montados al frente y debajo del robot con la finalidad de no salir del tatami, así como del sensor Sharp GPD que detecta la presencia del oponente.
Estos datos son comunicados a un PIC 16F628A y este controla un integrado L293D que se encarga de los motores.
Como pueden ver es muy básico y sencillo de construír, sin embargo puede bien ser utilizado en competencias si le dan su toque personal con algunos micromotores de alto par y alta velocidad, como los pololu, pueden tambien adicionar otro sensor Sharp, o más CNY.
En fin, siéntanse libres de utilizar el esquema y adicionarle, quietarle o adapatarle lo que mejor parezca cubrir sus necesidades.
Anexo tambien el archivo .hex por si algún entusiasta decide montarlo rápidamente y quiere verlo funcionar; aclaro que el programa anexo es básico, solo para no salir del tatami y detectar al oponente, ya cada quien adoptará su propia estrategia.
Es tan pequeño el circuito que muy bien puede montarse en un protoboard chico y tenerlo funcionando en un par de horas.
para la carcasa de ocupó plastico de 3mm y lámina galvanizada calibre 32.
Dejo el video con las primeras pruebas:
Espero que les agrade y séa de ayuda para alguien,
saludos cordiales.
El presente mini sumo básico, consta de dos motorreductores de 1.4 kg, ruedas de 6 cms de diámetro, y tiene una altura de 86 milímetros.
Para el momento de las fotos y pruebas aún no se le han colocado lastres para hacerlos llegar a su máximo peso (estarán en "engorda", ya que les faltan 230 gramos aún).
La electrónica esta formada por dos simples LM358 en modo comparador para los sensores CNY70 montados al frente y debajo del robot con la finalidad de no salir del tatami, así como del sensor Sharp GPD que detecta la presencia del oponente.
Estos datos son comunicados a un PIC 16F628A y este controla un integrado L293D que se encarga de los motores.
Como pueden ver es muy básico y sencillo de construír, sin embargo puede bien ser utilizado en competencias si le dan su toque personal con algunos micromotores de alto par y alta velocidad, como los pololu, pueden tambien adicionar otro sensor Sharp, o más CNY.
En fin, siéntanse libres de utilizar el esquema y adicionarle, quietarle o adapatarle lo que mejor parezca cubrir sus necesidades.
Anexo tambien el archivo .hex por si algún entusiasta decide montarlo rápidamente y quiere verlo funcionar; aclaro que el programa anexo es básico, solo para no salir del tatami y detectar al oponente, ya cada quien adoptará su propia estrategia.
Es tan pequeño el circuito que muy bien puede montarse en un protoboard chico y tenerlo funcionando en un par de horas.
para la carcasa de ocupó plastico de 3mm y lámina galvanizada calibre 32.
Dejo el video con las primeras pruebas:
Espero que les agrade y séa de ayuda para alguien,
saludos cordiales.
Adjuntos
-
 ESQUEMA_MINISUMO.jpg37.6 KB · Visitas: 913
ESQUEMA_MINISUMO.jpg37.6 KB · Visitas: 913 -
 TATAMI_MINISUMO.jpg40.1 KB · Visitas: 600
TATAMI_MINISUMO.jpg40.1 KB · Visitas: 600 -
 DSC02087.JPG197.3 KB · Visitas: 539
DSC02087.JPG197.3 KB · Visitas: 539 -
 DSC02088.JPG210.3 KB · Visitas: 444
DSC02088.JPG210.3 KB · Visitas: 444 -
 DSC02089.JPG204.8 KB · Visitas: 411
DSC02089.JPG204.8 KB · Visitas: 411 -
 DSC02090.JPG196.9 KB · Visitas: 370
DSC02090.JPG196.9 KB · Visitas: 370 -
 DSC02091.JPG191 KB · Visitas: 361
DSC02091.JPG191 KB · Visitas: 361 -
 DSC02093.JPG203.9 KB · Visitas: 332
DSC02093.JPG203.9 KB · Visitas: 332 -
 DSC02094.JPG187.5 KB · Visitas: 314
DSC02094.JPG187.5 KB · Visitas: 314 -
 DSC02101.JPG200 KB · Visitas: 294
DSC02101.JPG200 KB · Visitas: 294 -
 DSC02102.JPG202 KB · Visitas: 269
DSC02102.JPG202 KB · Visitas: 269 -
 DSC02103.JPG201.7 KB · Visitas: 256
DSC02103.JPG201.7 KB · Visitas: 256 -
 DSC02104.JPG193.6 KB · Visitas: 268
DSC02104.JPG193.6 KB · Visitas: 268 -
 DSC02105.JPG199.4 KB · Visitas: 260
DSC02105.JPG199.4 KB · Visitas: 260 -
 DSC02106.JPG205.7 KB · Visitas: 219
DSC02106.JPG205.7 KB · Visitas: 219 -
 DSC02107.JPG198.7 KB · Visitas: 224
DSC02107.JPG198.7 KB · Visitas: 224 -
 DSC02108.JPG202.4 KB · Visitas: 220
DSC02108.JPG202.4 KB · Visitas: 220 -
 DSC02110.JPG197.8 KB · Visitas: 220
DSC02110.JPG197.8 KB · Visitas: 220 -
 DSC02111.JPG202 KB · Visitas: 287
DSC02111.JPG202 KB · Visitas: 287
") , en la universidad donde trabajo unos alumnos andan con ideas de hacerse uno de estos
, en la universidad donde trabajo unos alumnos andan con ideas de hacerse uno de estos 