Buenas, buenas, este es mi primer post así que voy al grano.
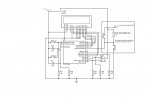
Diseñe un contador de pulsos con un pic 16f628a + un LCD, para una maquina que tiene que cortar etiquetas, (Programado en su totalidad con pic basic pro) la consigna es que del eje del bobinador se van a tomar 6 pulsos cada 1 metro.
Les comento que el proyecto lo tengo prácticamente terminado salvo un pequeño detalle, al final lo cuento...
Primero, para leer los pulsos use la función If con pésimos resultados ya que perdía muchos pulsos cuando probaba con velocidades de +/-3000 revoluciones (50Hz) lo que hacia el programa totalmente impreciso, sirvió para probar mi proyecto pero lo descarte porque no era lo que necesitaba.
Segundo, aprendí a usar las interrupciones si bien la precisión mejoro tenia el problema de que a veces contaba pulsos de mas, mas que nada cuando variaba la velocidad de los pulsos, así que también lo tuve que descartar
Tercero, gracias a este foro aprendí a usar el timer0 con el que logre la cuenta perfecta y el proyecto funciono de 10
Ahora viene el pequeño detalle feliz de la vida por que el proyecto había funcionado perfecto lo pruebo, cuento 1 metro cuento 2 metros cuento 12 metros y digo ya fue, le voy a dar la cuenta máxima que me permitía la variable de comparación que para la maquina es 10992 metros (variable de 16 bit) (Acuérdense que cada 6 pulsos es 1 metro) pero acá volví a tener problemas ya que el contador me cuenta únicamente hasta 42 metros (timer0 = 8 bit).
Ahora, ¿que intente? Hacer desbordar el timer0 cada 6 pulsos. No pude
trate de usar el timer1 que es de 16 bit y tampoco pude, es mas leyendo acá en el foro lo único que Yo encontré fue para usarlo con el contador interno nunca externo. Así que hasta acá llegue. Si alguien me da una mano con este problemilla le voy a estar muy agradecido, ya que no use los divisores del timer0 porque quiero que el proyecto sea totalmente adaptable a los pulsos que yo quiero contar por vuelta como en este caso 6.
Desde ya muchas gracias y voy a estar atento a sus sugerencias y dudas con respecto a lo que escribí.
Diseñe un contador de pulsos con un pic 16f628a + un LCD, para una maquina que tiene que cortar etiquetas, (Programado en su totalidad con pic basic pro) la consigna es que del eje del bobinador se van a tomar 6 pulsos cada 1 metro.
Les comento que el proyecto lo tengo prácticamente terminado salvo un pequeño detalle, al final lo cuento...
Código:
cmcon = 7
DEFINE OSC 4 ; Definir que se trabajará con 4MHz. (Osc. Interno)
define LCD_DREG PORTA
define LCD_DBIT 0
define LCD_RSREG PORTB
define LCD_RSBIT 1
define LCD_EREG PORTB
define LCD_EBIT 3
sube var portb.5 'Prog = portb 5 entrada sube
baja var portb.6 'Prog = portb 6 entrada sube
sensor var porta.4 'Sensor = porta 4 entrada sensor
rele var portb.2 'Para = portb 2 salida rele
xcien var porta.6 'Inicia = porta 6 inicia toda la secuencia
xuno var porta.7 'Sube = porta 7 entrada pulsador
metro var word 'Convierto a metro en una variable word
metrop var word 'Convierto a metrop en una variable word
cantidad var word 'Convierto a cantidad en una variable word
cantidadp var word 'Convierto a cantidadp en una variable word
metrom var word
metro=0 'Seteo la variable metro en 0
cantidad=0 'Seteo la variable cantidad en 0
Principio:
INTCON = %11100000 'Modifico las opciones del timer0 y lo
OPTION_REG = %00111000 'configuro como contador. Tomo los pulsos del
TMR0 = 0 'PortA4. Seteo el registro TMR0 en "0"
call retardo 'retardo para esperar que funcione el LCD
LCDOUT $FE, 1,"Contador" 'limpiar pantalla y sacar el texto Contador
call retardo2
LCDOUT $FE, 1
goto Inicio
Inicio:
metro = TMR0
metrop = metro / 6
lcdout $FE, $C0, dec metrop
lcdout $FE, $C5,"Mts"
lcdout $FE, $85,"Mts"
low rele
if sube = 1 then subir
if baja = 1 then bajar
goto comparar
Comparar:
if cantidadp = metrop then
TMR0 = 0
lcdout $FE, $Cc,"Para"
high rele
call retardo2
lcdout $FE, $Cc," "
lcdout $FE, $C0," "
goto Inicio
endif
Subir:
if xuno = 1 then
call retardo
cantidad = cantidad + 6
cantidadp = cantidad / 6
call escribir 'pasar al comienzo de la segunda línea
else
if xcien = 1 then
call retardo
cantidad = cantidad + 600
cantidadp = cantidad / 6
call escribir
endif
endif
goto inicio
Bajar:
if xuno = 1 then
call retardo
cantidad = cantidad - 6
cantidadp = cantidad / 6
call escribir 'pasar al comienzo de la segunda línea
else
if xcien = 1 then
call retardo
cantidad = cantidad - 600
cantidadp = cantidad / 6
call escribir
endif
endif
goto inicio
retardo:
pause 250
return
retardo2:
pause 3000
return
Escribir:
LCDOUT $FE, 1, dec cantidadp
return
endPrimero, para leer los pulsos use la función If con pésimos resultados ya que perdía muchos pulsos cuando probaba con velocidades de +/-3000 revoluciones (50Hz) lo que hacia el programa totalmente impreciso, sirvió para probar mi proyecto pero lo descarte porque no era lo que necesitaba.
Segundo, aprendí a usar las interrupciones si bien la precisión mejoro tenia el problema de que a veces contaba pulsos de mas, mas que nada cuando variaba la velocidad de los pulsos, así que también lo tuve que descartar
Tercero, gracias a este foro aprendí a usar el timer0 con el que logre la cuenta perfecta y el proyecto funciono de 10
Ahora viene el pequeño detalle feliz de la vida por que el proyecto había funcionado perfecto lo pruebo, cuento 1 metro cuento 2 metros cuento 12 metros y digo ya fue, le voy a dar la cuenta máxima que me permitía la variable de comparación que para la maquina es 10992 metros (variable de 16 bit) (Acuérdense que cada 6 pulsos es 1 metro) pero acá volví a tener problemas ya que el contador me cuenta únicamente hasta 42 metros (timer0 = 8 bit).
Ahora, ¿que intente? Hacer desbordar el timer0 cada 6 pulsos. No pude
trate de usar el timer1 que es de 16 bit y tampoco pude, es mas leyendo acá en el foro lo único que Yo encontré fue para usarlo con el contador interno nunca externo. Así que hasta acá llegue. Si alguien me da una mano con este problemilla le voy a estar muy agradecido, ya que no use los divisores del timer0 porque quiero que el proyecto sea totalmente adaptable a los pulsos que yo quiero contar por vuelta como en este caso 6.
Desde ya muchas gracias y voy a estar atento a sus sugerencias y dudas con respecto a lo que escribí.