Hola,
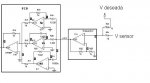
Necesito controlar un motor de corriente continua, pese a no ser el analógico el camino mas adecuado, ya que no dispongo del tiempo necesario para aprender a programar e implementar un microcontrolador ¿Alguien ha probado a implemtar dicho controlador con amplificadores operacionales de la manera mostrada en el archivo adjunto?
Un saludo.
Necesito controlar un motor de corriente continua, pese a no ser el analógico el camino mas adecuado, ya que no dispongo del tiempo necesario para aprender a programar e implementar un microcontrolador ¿Alguien ha probado a implemtar dicho controlador con amplificadores operacionales de la manera mostrada en el archivo adjunto?
Un saludo.