Follow along with the video below to see how to install our site as a web app on your home screen.

Nota: This feature currently requires accessing the site using the built-in Safari browser.

los resultados por ahora son negativos . no puedo hacer que el texto se desplace
Define Osc 4
CMCON = 7
TrisA=%00001111
TrisB=%00000000
PORTA = %00000000
PORTB = %00000000
repetir var byte
[B]Aumen var word
Aumen=0[/B]
cartel:
[B]pause Aumen[/B]
for repetir = 1 to 1000
portb = %11111111:pauseus 300
portb = 0:pauseus 300
portb = %00010000:pauseus 300
portb = 0:pauseus 300
portb = %00010000:pauseus 300
portb = 0:pauseus 300
portb = %00010000:pauseus 300
portb = 0:pauseus 300
portb = %11111111:pauseus 300
portb = 0:pause 2
portb = %01111110:pauseus 300
portb = 0:pauseus 300
portb = %10000001:pauseus 300
portb = 0:pauseus 300
portb = %10000001:pauseus 300
portb = 0:pauseus 300
portb = %10000001:pauseus 300
portb = 0:pauseus 300
portb = %01111110:pauseus 300
portb = 0:pause 2
portb = %11111111:pauseus 300
portb = 0:pauseus 300
portb = %10000000:pauseus 300
portb = 0:pauseus 300
portb = %10000000:pauseus 300
portb = 0:pauseus 300
portb = %10000000:pauseus 300
portb = 0:pauseus 300
portb = %00000000:pauseus 300
portb = 0:pause 2
portb = %11111110:pauseus 300
portb = 0:pauseus 300
portb = %00010001:pauseus 300
portb = 0:pauseus 300
portb = %00010001:pauseus 300
portb = 0:pauseus 300
portb = %00010001:pauseus 300
portb = 0:pauseus 300
portb = %11111110:pauseus 300
portb = 0:pause 4
next repetir
for repetir = 1 to 1000
portb = %01111110:pauseus 300
portb = 0:pauseus 300
portb = %10000001:pauseus 300
portb = 0:pauseus 300
portb = %10000001:pauseus 300
portb = 0:pauseus 300
portb = %10000001:pauseus 300
portb = 0:pauseus 300
portb = %10000001:pauseus 300
portb = 0:pause 2
portb = %01111110:pauseus 300
portb = 0:pauseus 300
portb = %10001001:pauseus 300
portb = 0:pauseus 300
portb = %10001001:pauseus 300
portb = 0:pauseus 300
portb = %10001001:pauseus 300
portb = 0:pauseus 300
portb = %10001110:pauseus 300
portb = 0:pause 2
portb = %10001110:pauseus 300
portb = 0:pauseus 300
portb = %10001001:pauseus 300
portb = 0:pauseus 300
portb = %10001001:pauseus 300
portb = 0:pauseus 300
portb = %10001001:pauseus 300
portb = 0:pauseus 300
portb = %01110001:pauseus 300
portb = 0:pause 2
portb = %11111110:pauseus 300
portb = 0:pauseus 300
portb = %00010001:pauseus 300
portb = 0:pauseus 300
portb = %00010001:pauseus 300
portb = 0:pauseus 300
portb = %00010001:pauseus 300
portb = 0:pauseus 300
portb = %11111110:pauseus 300
portb = 0:pause 2
portb = %11111111:pauseus 300
portb = 0:pauseus 300
portb = %00011001:pauseus 300
portb = 0:pauseus 300
portb = %00101001:pauseus 300
portb = 0:pauseus 300
portb = %01001001:pauseus 300
portb = 0:pauseus 300
portb = %10001110:pauseus 300
portb = 0:pause 2
portb = %11111111:pauseus 300
portb = 0:pauseus 300
portb = %00011000:pauseus 300
portb = 0:pauseus 300
portb = %00100100:pauseus 300
portb = 0:pauseus 300
portb = %01000010:pauseus 300
portb = 0:pauseus 300
portb = %10000001:pauseus 300
portb = 0:pause 2
portb = %11111111:pauseus 300
portb = 0:pauseus 300
portb = %00011000:pauseus 300
portb = 0:pauseus 300
portb = %00100100:pauseus 300
portb = 0:pauseus 300
portb = %01000010:pauseus 300
portb = 0:pauseus 300
portb = %11111111:pauseus 300
portb = 0:pause 4
next repetir
[B]aumen=aumen+10
if aumen=10000 then aumen=0[/B]
goto cartel
endpodrias usar el famosisimo CNY70bueno el robotcito ojala puedas explicar un poquito mas lo de los sensores de proximidad
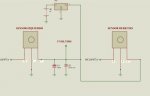
creo que la diferencia entre el mio y el tuyo es que yo le puse un opto abierto para indicarle al micro el inicio... como una especie de sincronizacion
Puedes usar el PWM interno del micro(si cuenta con el) en algun lado de este tema puse un link a una pagina que calcula los datos para los registros...he estado pidiendo varias veces por aqui que me ayuden pero no he recibido respuesta,
nose mucho sobre robotica, apenas estoy empezando
. dejame decirte que si el diseño del hardware y el software es tuyo, estas muy avanzado. eso esta muy bien ya que, no hay que darle el pez al hombre sino la caña y enseñarle a pezcar jejej me vaje el archivo.HEX y programe el PIC16F84A
no asi no es facil...no es tan facil no?
... (en realidad a mi no me llama la atencion eso de los radios)