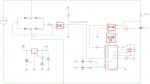
hola cripty, aver si entendi necesitas saber la onda de pulsos solo cuando hay cruce por cero si es asi lo podrias hacer con un puente de diodos, lo cual te rectificaria la onda sinusoidal a 380 onda completa (1N4007 x4),un optotransistor,dos resitencias una de 68-100k para ingreso del opto y la otra resist. de 4,7k a la salida de optotransistor en pull up a 5 vdc esta salida ingresaria al uc.
PD:espero te pueda servir
PD:espero te pueda servir
")