

Nepper
Miembro algo reconocido
Buenas!
Primero que todo. Una masa el sistema autómatico de busqueda del foro cuando colocas el titulo.")
Voy a preguntar un tema mas bien matematico, no tanto electrónico. Estoy trabajando con robots industriales, y estos utilizan un sistema de referencia para moverse. La punta del robot (el punto de referencia movil, que utilizaremos para mover la herramienta que maneja el robot) la llamaremos TCP.
Este punto en el espacio tridimensional, no solo tiene una posición en X, Y y Z, si no que además se le deben definir 4 cuaternios, q1, q2, q3 y q4.
Los cuaternios los utiliza para indicarle al robot, la rotación y orientación que posee el TCP
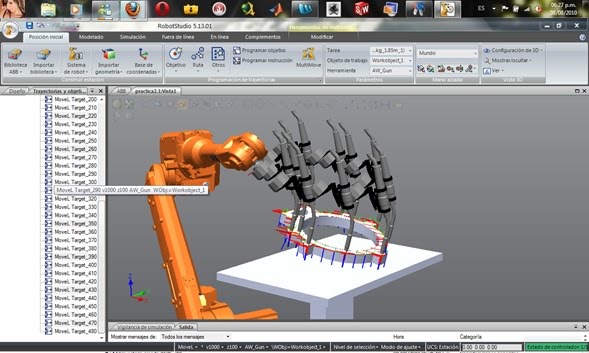
Una herramienta con sus puntos recorridos:
Definición de TCP:

¿Que sucede? yo quiero definir un nuevo TCP. Justamente, mi herramienta será una torcha de soldadura MIG
Imaginen, que la punta de esa torcha, se encuentra a 100mm en Y, a 0 en X y a -50 en Z {100,0,-50}respecto de la punta del robot (sin herramienta).
Pero existe un problema. Yo quiero que la dirección de la tobera, sea el eje Z. Si se me ocurre subirlo (moverlo en Z), el robot tiene que moverse de tal forma que la tobera suba o baje siempre a 45º (segun el caso de la foto). Pero si yo pongo la tobera a 90º respecto al suelo, la tobera tiene que subir y bajar como si fuera el eje Z real. ¿se entiende?
El problema ocurrió cuando quise definir un nuevo TCP. Le asigné el X, Y, Z correspondientes, pero a la hora de definir los cuaternios, este me daba falla. Basicamente, no se geometricamente que estoy haciendo poniendole numeros a los cuaternios.
Estuve investigando, y en la wikipedia explica la rotación y orientación de los cuaternios, pero no puedo relacionarlo con los 4 parametros que me pide el robot.
Estuve buscando sobre ellos, y note que se utiliza mucho en computación, vi videos en youtube pero nada dice como paso de la definición a los 4 que necesita el robot.
Pude ver que 1 cuaternio consta de 4 numeros, es como un numero complejo, pero con 4 terminos.
El numero complejo, pongo su valor en X para los reales y Y para los complejos, y obtengo el vector del cual puedo calcular su modulo y angulo, ¿pero en el cuaternio como hago?
Supongan que hago 0 al valor real del cuaternio, se que obtengo las coordenadas en x, y, z de mi vector. q=0+ a i + b j + c k. Pero no obtengo la rotación... bueno, no la veo!
¿Alguien sabe bien como visualizar los cuaternios y como interpretarlos en el espacio? O sea, ¿Como se que numeros me indican que rotación y orientación?
Tema jodido, pero gracias por leer por lo menos
PS: la barra de inicio de la primer imagen NO es de mi computadora u_u
Primero que todo. Una masa el sistema autómatico de busqueda del foro cuando colocas el titulo.
Voy a preguntar un tema mas bien matematico, no tanto electrónico. Estoy trabajando con robots industriales, y estos utilizan un sistema de referencia para moverse. La punta del robot (el punto de referencia movil, que utilizaremos para mover la herramienta que maneja el robot) la llamaremos TCP.
Este punto en el espacio tridimensional, no solo tiene una posición en X, Y y Z, si no que además se le deben definir 4 cuaternios, q1, q2, q3 y q4.
Los cuaternios los utiliza para indicarle al robot, la rotación y orientación que posee el TCP
Una herramienta con sus puntos recorridos:
Definición de TCP:
¿Que sucede? yo quiero definir un nuevo TCP. Justamente, mi herramienta será una torcha de soldadura MIG
Imaginen, que la punta de esa torcha, se encuentra a 100mm en Y, a 0 en X y a -50 en Z {100,0,-50}respecto de la punta del robot (sin herramienta).
Pero existe un problema. Yo quiero que la dirección de la tobera, sea el eje Z. Si se me ocurre subirlo (moverlo en Z), el robot tiene que moverse de tal forma que la tobera suba o baje siempre a 45º (segun el caso de la foto). Pero si yo pongo la tobera a 90º respecto al suelo, la tobera tiene que subir y bajar como si fuera el eje Z real. ¿se entiende?
El problema ocurrió cuando quise definir un nuevo TCP. Le asigné el X, Y, Z correspondientes, pero a la hora de definir los cuaternios, este me daba falla. Basicamente, no se geometricamente que estoy haciendo poniendole numeros a los cuaternios.
Estuve investigando, y en la wikipedia explica la rotación y orientación de los cuaternios, pero no puedo relacionarlo con los 4 parametros que me pide el robot.
Estuve buscando sobre ellos, y note que se utiliza mucho en computación, vi videos en youtube pero nada dice como paso de la definición a los 4 que necesita el robot.
Pude ver que 1 cuaternio consta de 4 numeros, es como un numero complejo, pero con 4 terminos.
El numero complejo, pongo su valor en X para los reales y Y para los complejos, y obtengo el vector del cual puedo calcular su modulo y angulo, ¿pero en el cuaternio como hago?
Supongan que hago 0 al valor real del cuaternio, se que obtengo las coordenadas en x, y, z de mi vector. q=0+ a i + b j + c k. Pero no obtengo la rotación... bueno, no la veo!
Historia de los cuaternios dijo:Al momento de hacer interpretaciones geométricas, Hamilton se dio cuenta que haciendo que la parte real fuera igual a cero, las tres unidades imaginarias podían representar muy cómodamente los puntos en el espacio, y después identificó sus propiedades rotacionales. (http://www.oocities.org/ricardo_arturo/cuatern/hist.htm)
¿Alguien sabe bien como visualizar los cuaternios y como interpretarlos en el espacio? O sea, ¿Como se que numeros me indican que rotación y orientación?
Tema jodido, pero gracias por leer por lo menos
PS: la barra de inicio de la primer imagen NO es de mi computadora u_u