Hola a todos.
Bueno el caso que estaba mirando para hacer un control de posicion y velocidad para un motor.
y claro en un principio yo pensaba mandarle la señal del encoder al PC, y que el software hiciese el PID de posicion (solo conozco el Mach3, y no se si hará eso) y este le devuelva al servocontrol una señal de velocidad.
Pues despues de mirarlo, me parece preferible hacer tambien el control de posicion en el servocontrol, y aqui tengo la duda:
-Un metodo consiste en que el PC manda señales de paso y direccion, igual que a un PaP, y con un contador calcula la posicion deseada, que la compara con la real dada por el encoder para hacer el PID de posicion, etc.
-Hay otros metodos en los que el PC mande la señal de posicion que no sean a pasos?? porque si x ej. lo quiero para armarme un brazo robot y el software de esto funciona diferente, pues joderia y tal jejej.
-Otra duda (la mas importante) es la del control de aceleracion, se pueden hacer con el hardware usando x ej. un perfil de velocidad de forma trapezoidal.
Pero el mach3 por ejemplo ya te da una rampa de aceleracion, asi usando esta ya valdria no??
Sabeis si los programas que manejan brazos robot y otras cosas tambien dan las rampas asi como el mach3???
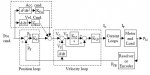
un esquema para el control de esta ultima forma (asi a ojo parece mas jodidillo que usando una rampa, aunque durante esta se daria un error de posicion no??
1 saludo
Bueno el caso que estaba mirando para hacer un control de posicion y velocidad para un motor.
y claro en un principio yo pensaba mandarle la señal del encoder al PC, y que el software hiciese el PID de posicion (solo conozco el Mach3, y no se si hará eso) y este le devuelva al servocontrol una señal de velocidad.
Pues despues de mirarlo, me parece preferible hacer tambien el control de posicion en el servocontrol, y aqui tengo la duda:
-Un metodo consiste en que el PC manda señales de paso y direccion, igual que a un PaP, y con un contador calcula la posicion deseada, que la compara con la real dada por el encoder para hacer el PID de posicion, etc.
-Hay otros metodos en los que el PC mande la señal de posicion que no sean a pasos?? porque si x ej. lo quiero para armarme un brazo robot y el software de esto funciona diferente, pues joderia y tal jejej.
-Otra duda (la mas importante) es la del control de aceleracion, se pueden hacer con el hardware usando x ej. un perfil de velocidad de forma trapezoidal.
Pero el mach3 por ejemplo ya te da una rampa de aceleracion, asi usando esta ya valdria no??
Sabeis si los programas que manejan brazos robot y otras cosas tambien dan las rampas asi como el mach3???
un esquema para el control de esta ultima forma (asi a ojo parece mas jodidillo que usando una rampa, aunque durante esta se daria un error de posicion no??
1 saludo