Scooter
Cascarrabias crónico
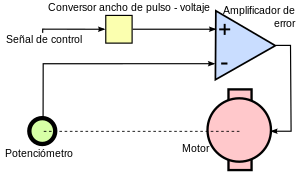
He estado documentandome sobre el uso de servos y por lo que he leído es una señal de periodo 20ms y según la amplitud del pulso, de 1 a 2ms determina la posición del servo.
La pregunta, que no he conseguido resolver aunque lo he buscado, es
¿Que pasa si dejo de enviar pulsos?, ¿Se queda donde está? ¿Vuelve al origen?
La cuestión sería para controlarlo con un arduino, mientras se esté moviendo voy regulando el ancho del pulso pero una vez "en su sitio" si "no digo nada mas" ¿Se queda ahí y me puedo olvidar de él hasta que lo quiera volver a mover? Sería lo mas práctico, así no me tengo que preocupar de él.
La pregunta, que no he conseguido resolver aunque lo he buscado, es
¿Que pasa si dejo de enviar pulsos?, ¿Se queda donde está? ¿Vuelve al origen?
La cuestión sería para controlarlo con un arduino, mientras se esté moviendo voy regulando el ancho del pulso pero una vez "en su sitio" si "no digo nada mas" ¿Se queda ahí y me puedo olvidar de él hasta que lo quiera volver a mover? Sería lo mas práctico, así no me tengo que preocupar de él.