


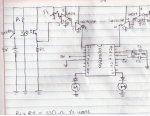
Bueno la idea de esto es que un carrito por medio de 2 sensores infrarrojos sea capas de rodiar objetos a su paso.... soy nuevo en esto por lo que necesito ayuda de alguien con mas experiencia... llevo esto echo, si alguien me hiciera el favor de decirme que esta mal o mas bien que le falta se lo agradecería mucho... adjunto diagrama.
#include <16F84A.h>
#include <stdio.h>
#FUSES XT,NOWDT,NOPROTECT,PUT
#use delay(clock=4000000)
///PROGRAMA
#define LED1 PIN_A0
#define LED2 PIN_A1
#define MOTOR1 PIN_B4
#define MOTOR2 PIN_B3
void main ()
{
delay_ms(500);
set_tris_b(0); //portb como salida <---creo que esta mal
set_tris_a(1); //porta como entrada
for (;") ;
;
{ do
{ if (LED1==0)
{ MOTOR1==1; }
else { MOTOR1==0; }
}
while (LED1==1)
do
{ if (LED2==0)
{ MOTOR2==1; }
else { MOTOR2=0; }
}
}
}
De antemano, gracias
#include <16F84A.h>
#include <stdio.h>
#FUSES XT,NOWDT,NOPROTECT,PUT
#use delay(clock=4000000)
///PROGRAMA
#define LED1 PIN_A0
#define LED2 PIN_A1
#define MOTOR1 PIN_B4
#define MOTOR2 PIN_B3
void main ()
{
delay_ms(500);
set_tris_b(0); //portb como salida <---creo que esta mal
set_tris_a(1); //porta como entrada
for (;
; { do
{ if (LED1==0)
{ MOTOR1==1; }
else { MOTOR1==0; }
}
while (LED1==1)
do
{ if (LED2==0)
{ MOTOR2==1; }
else { MOTOR2=0; }
}
}
}
De antemano, gracias
Adjuntos
Última edición: