Empiezo a intentar explicar el concepto que ya ha alcanzado una madurez para poner en peligro el modelo laboral y que debido a su muy grande potential se está desarrollando con gran velocidad.
Se trata de modelar las funciones que se ejecutan en un puesto de trabajo. Para muchos puestos de trabajo existe una descripción laboral que describe las funciones y las responsabilidades que debe cumplir aquel que tiene esa cierta función! De allí resulta una descripción que permite definir:
1. Que datos se requieren.
2. Que capacitación la persona requiere para esa labor.
3. Que funciones debe cumplir la persona a cargo del puesto.
4. Cuales son los resultados que se esperan realice la persona a cargo de cierta función laboral.
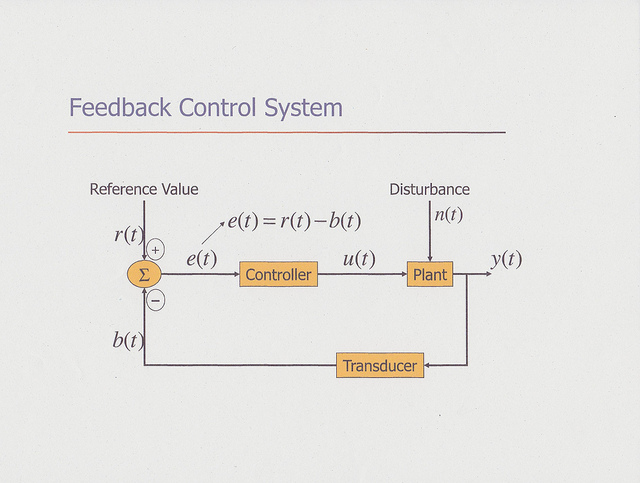
Usemos este gráfico de un sencillo modelo del círculo de control:
Lo que en el gráfico se llama "Reference Value" sería lo que listo como los puntos "1" y "2" de una descripción laboral.
Sigamos en varios pasos.
Esos datos entran en el bloque de "Controller" y tienen como resultado el capacitar la persona ejecutando ese trabajo, aquí tal persona sería lo llamada "Plant". La función u(t) es el número de funciones que debe cumplir tal persona, ver "3", para generar los resultados deseados, aquí y(t).
Las cosas inesperadas que ocurren en todo trabajo es lo que aquí se llama "Disturbance". Esos factores que influencian el resultado de las labores ejecutadas por la persona en cierto puesto de trabajo llevan a que el resultado y(t) no sea el resultado deseado, sino que difiere en algún sentido y magnitud.
El Transducer es la función que monitorea de forma adecuada esos resultados y los traduce en forma adecuada para informar al "jefe". El "jefe" es el "Controller" que recibe la información en que medida el trabajo realizado lleva a resultados que difieren de aquellos deseados, eso se denomina aquí como la función e(t). Esto lleva a que el "jefe" corriga y adapte sus instrucciones al subordinado, modificando la función u(t) para reducir la medida en que el resultado de un trabajo difiere de lo deseado.
Este modelo de control en sí no es nada nuevo, sino que realmente es algo que existe desde mucho tiempo y que en cierto sentido describe las funciones de "jefe" y "subordinado" para que el "sistema" genere los resultados deseados y corriga desviaciones.
Lo que ha avanzado de forma dramática y sigue avanzando de forma dramática es el desarrollo científico y en consecuencia la descripción de elementos del círculo de control y sus diversas funciónes de forma matemática. También lo que se está avanzando de forma dramática son las herramientas informáticas, Matlab y Simulink con sus "toolboxes" como un ejemplo. Allí existen y son disponibles las ecuaciones matemáticas para el uso de círculos de control para los mas diversos campos.
Aquí el enlace a las toolboxes en Español.
Pero no solo eso es importante en considerar. Hay que ver los avances que implican el módulo el "Control". Sea en el campo de la lógica "fuzzy", sea en el campo de las expresiones lógicas y las expresiones de la lógica modal, sea en el campo de la inteligencia artificial, sea el impacto de las investigaciones que se realizan para aprender de las formas de funcionar biológicas, como sistemas hormonales, de los sistemas vegetativos y de las formas de autoorganización como las vemos como ejemplo en el control del movimiento de las patas en insectos.
Sistemas equivalentes a los sistemas hormonales toman en consideración efectos continuos y su impacto paulatino. En el caso de mi afición al modelismo naval tales sistemas se usan para mantener un velero a la larga encausado a la próxima destinación durante la navegación autónoma.
Los sistemas vegetativos que implementan funciones de control no centralizadas.
Finalmente los sistemas de autoorganización como los que se encargan que un ciempiés nunca tropieza con sus múltiples patas. estos sistemas permiten reacciones rápidas.
Como es con frecuencia, tales sistemas primero se implementan en sistemas donde el factor del costo juega un papel menor, como por ejemplo en tecnologías espaciales. Los robots por ejemplo que se movilizan en marte tiene que reaccionar de forma medio autónoma, pues el tiempo que pasa entre que la información de sensores llegue a la tierra, sea procesado y que nuevas instrucciones transmitidas lleguen a marte hace la operabilidad autónoma indispensable.
Volviendo al mundo laboral. Obviamente también aquí veremos el impacto de esta tecnología en aquellas ramas laborales donde el impacto pecuniario es mayor, o donde el impacto de la calidad es mayor, por ejemplo en la aviación. pero también podemos ver el impacto en las finanzas, donde en mathworks ya existe una librería de toolboxes.
Pero seamos sinceros y olvidémonos de las personas haciendo alpargatas! Cual porcentaje de los puestos laborales no puede ser descrito usando el modelo de control presentado arriba, mas cuando las herramientas, sean informáticas o matemáticas, sean disponibles y una generación de ingenieros reciba la instrucción requerida.
Ojalá me halla sido posible explicar algo mejor la materia. No es sencilla y si no fuera porque me metido en la aventura de describir un sistema relativamente complejo para el control de escotas que me he inventado, usando las tecnologías de modelación, simulación e implementación, quizá no hubiera percibido el potencial de esto en el mundo laboral!
Lo que he dejado por fuera es el tema de la implementación. Abreviaciones como HiL, hardware in the loop, y SiL, software in the loop, tratan esto y toolboxes que generan ecuaciones para los módulos de control y de planta que aproximan los resultados medidos experimentalmente aun facilitan mas la implementación! Lo esencial es el poder medir los que se controla, sea directamente o indirectamente alguna magnitud que tenga una relación con algo que no se pueda medir.







.jpeg")
