

hola a todos,
tengo un robot conectado de esta forma "mas o menos igual". digo más o menos porque yo uso todo modular, es decir, drivers l298 ya montados, arruino mega, GSM shield ya montado, y lo único que tuve que hacer es los circuitos de los reguladores de tensión para el servo y las luces que no vienen en el esquema. más soldar las pilas... en total son 2 baterías de 12 pilas, que dan una tensión de 14.4V cuando están descargadas... y cuando están cargadas 17 V largos. el caso es que conectando todo en paralelo como pretendo que se vea en el esquema, he medido los motores (tensión de salida) y corriente (por separado).cuando las baterías estan casi descargadas me salen 7 volts por motor, y 0.77 Amperios... ¿a que se debe esto? no deberían dar 14.4 - 2 (consumo del driver).... claro debe ser que al poner 3 drivers, la tensión baja 6V. lo que me queda: 14.4 - 6 = 8.4V. es correcto esto? me acaba de venir a la cabeza...jajaja
disculpad las molestias... debe ser este el fallo... ...
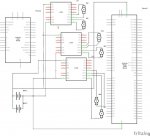
disculpas, aquí pongo el esquema... se me pasó...
tengo un robot conectado de esta forma "mas o menos igual". digo más o menos porque yo uso todo modular, es decir, drivers l298 ya montados, arruino mega, GSM shield ya montado, y lo único que tuve que hacer es los circuitos de los reguladores de tensión para el servo y las luces que no vienen en el esquema. más soldar las pilas... en total son 2 baterías de 12 pilas, que dan una tensión de 14.4V cuando están descargadas... y cuando están cargadas 17 V largos. el caso es que conectando todo en paralelo como pretendo que se vea en el esquema, he medido los motores (tensión de salida) y corriente (por separado).cuando las baterías estan casi descargadas me salen 7 volts por motor, y 0.77 Amperios... ¿a que se debe esto? no deberían dar 14.4 - 2 (consumo del driver).... claro debe ser que al poner 3 drivers, la tensión baja 6V. lo que me queda: 14.4 - 6 = 8.4V. es correcto esto? me acaba de venir a la cabeza...jajaja
disculpad las molestias... debe ser este el fallo... ...
disculpas, aquí pongo el esquema... se me pasó...
Adjuntos
Última edición por un moderador: