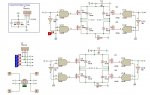
Hola a todos, tengo un motor SANYO DENKI STEP SYN de 2.9A 0.72DEG/STEP, tiene 5 cables, buscando por internet encontre el datasheet, donde indica que es un motor de 5 fases y muestra la siguiente tabla de control:

Acabo de probar, colocando la primera secuencia los cables con "*" los coloque a 5V 40A (Fuente ATX) y el resto a tierra, los cables de alimentación de mi protoboard se derritieron por la corriente , asi que decidi acudir a la ayuda de gente que sepa de esto, no estoy muy seguro pero la "sobrecorriente" sucedio cuando force al motor a moverse (10 pasos) con mi mano al probar que el eje se encuentre fijo.
, asi que decidi acudir a la ayuda de gente que sepa de esto, no estoy muy seguro pero la "sobrecorriente" sucedio cuando force al motor a moverse (10 pasos) con mi mano al probar que el eje se encuentre fijo.
¿Como controlo este tipo de motores?
¿Como puedo limitar la corriente (Tengo que mover una base giratoria por lo que necesito toda la corriente posible)?
Video del motor:
Saludos
Joseph
Acabo de probar, colocando la primera secuencia los cables con "*" los coloque a 5V 40A (Fuente ATX) y el resto a tierra, los cables de alimentación de mi protoboard se derritieron por la corriente
, asi que decidi acudir a la ayuda de gente que sepa de esto, no estoy muy seguro pero la "sobrecorriente" sucedio cuando force al motor a moverse (10 pasos) con mi mano al probar que el eje se encuentre fijo.¿Como controlo este tipo de motores?
¿Como puedo limitar la corriente (Tengo que mover una base giratoria por lo que necesito toda la corriente posible)?
Video del motor:
Joseph
Última edición: