


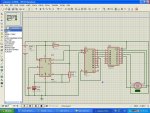
hola foreros, tengo un problema con un motor paso a paso, lo hago correr con el diagrama que adjunte, con este diagrama ise mover un motor pequeño unipolar y a baja velocidad funciona bien pero al girar el potenciometro para aumentar velocidad, ya no gira solo zapate o salta, y a este circuito le adicione un juego de reles para hacer mover un unipolar ya mas grande de 3A, ocurre lo mismo a baja velocidad funciona bien pero a alta no corre, y yo necesito potencia y buena velocidad para trabajarlo como un agitador, por favor si alguien me ayude!!!,
motor:
sanyo denki
1.8 deg
3.25A
type: 103h7124-1041
o si tienen un circuito que funciona bien con este motor les agradeceria bastante ..
............gracias de antemano
motor:
sanyo denki
1.8 deg
3.25A
type: 103h7124-1041
o si tienen un circuito que funciona bien con este motor les agradeceria bastante ..
............gracias de antemano
")