

Que tal amigos! aqui pego un breve fragmento del Gran Mario Sacco...exNeoteo precisamente hablando sobre enlaces Bluetooth:
"Cada botón estará asociado al simple envío de un texto gracias a la conexión Bluetooth del dispositivo Android que estemos utilizando hacia el PIC “remoto”. Recordemos que para encender un LED necesitábamos enviar un “100” y para apagarlo un “200”. La instrucción HSERIN utilizada en Amicus, necesita recibir (luego del número) un caracter “que no sea numérico” para interpretar que todo lo anterior es el número. Es decir, si le enviamos el 100 solo, se quedará esperando más datos numéricos, porque siempre espera eso, datos numéricos. Cualquier caracter “no numérico” finaliza la recepción y define lo recibido como la información útil. Es decir, si recibe un 100 se queda esperando más números. Si en cambio recibe 100A, detecta que la A es el caracter “no numérico” que cierra la recepción de datos. Por lo tanto, eso enviaremos nosotros."
...y Bueno a mi funciono como sigue:
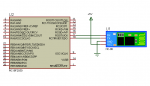
Utilize un PIC16F628A con USART RX/TX
D@rkbytes me ayudo a configurar el usart para 20 Mhz
Utilize el compilador proton ide 2.0.0.7
Modulo Bluetooth HC-06
APP inventor sobre la plataforma Android
Enseguida envie por el serial comunicator de proton valores numericos ej.100,200 para encender o apagar 3 leds y todo sin problemas excepto que a veces tenia que darle 1 o 2 enter a mi teclado no se si este fallando o sea parte de la comunicacion Bluetooth,bueno lo di por bueno.Despues ya con mi celular envie atravez del diagrama de bloques de APP INVENTOR_ANDROID valores numericos como 100(encender leds),200(apagar leds) y no me funciono,despues envie letras como A,B,C,D (haciendo referencia al codigo ASCII),.y tampoco me funciono,hasta que hice lo que dice el fragmento citado arriba agregar un valor no numerico al final y me funciono,encendi y apague los tres leds,lo que no se es lo siguiente no se si alguien ya lo probo o ya lo soluciono resulta que en el codigo original esta declarada una variable LED del tipo byte (0-255) que es donde se guardan los valores recibidos del diagrama de bloques app inventor via bluetooth(celular),aqui la pregunta es ¿si estamos enviando valores del tipo 100A,200A,o mayores a estos,se tendria que cambiar la variable LED(0-255) a tipo WORD? o no le afectaria? o alguien lo ha probado con valores en decenas de este tipo 10A,20A,digo esto para no cambiar la variable LED tipo Byte...Gracias por su atencion.
"Cada botón estará asociado al simple envío de un texto gracias a la conexión Bluetooth del dispositivo Android que estemos utilizando hacia el PIC “remoto”. Recordemos que para encender un LED necesitábamos enviar un “100” y para apagarlo un “200”. La instrucción HSERIN utilizada en Amicus, necesita recibir (luego del número) un caracter “que no sea numérico” para interpretar que todo lo anterior es el número. Es decir, si le enviamos el 100 solo, se quedará esperando más datos numéricos, porque siempre espera eso, datos numéricos. Cualquier caracter “no numérico” finaliza la recepción y define lo recibido como la información útil. Es decir, si recibe un 100 se queda esperando más números. Si en cambio recibe 100A, detecta que la A es el caracter “no numérico” que cierra la recepción de datos. Por lo tanto, eso enviaremos nosotros."
...y Bueno a mi funciono como sigue:
Utilize un PIC16F628A con USART RX/TX
D@rkbytes me ayudo a configurar el usart para 20 Mhz
Utilize el compilador proton ide 2.0.0.7
Modulo Bluetooth HC-06
APP inventor sobre la plataforma Android
Enseguida envie por el serial comunicator de proton valores numericos ej.100,200 para encender o apagar 3 leds y todo sin problemas excepto que a veces tenia que darle 1 o 2 enter a mi teclado no se si este fallando o sea parte de la comunicacion Bluetooth,bueno lo di por bueno.Despues ya con mi celular envie atravez del diagrama de bloques de APP INVENTOR_ANDROID valores numericos como 100(encender leds),200(apagar leds) y no me funciono,despues envie letras como A,B,C,D (haciendo referencia al codigo ASCII),.y tampoco me funciono,hasta que hice lo que dice el fragmento citado arriba agregar un valor no numerico al final y me funciono,encendi y apague los tres leds,lo que no se es lo siguiente no se si alguien ya lo probo o ya lo soluciono resulta que en el codigo original esta declarada una variable LED del tipo byte (0-255) que es donde se guardan los valores recibidos del diagrama de bloques app inventor via bluetooth(celular),aqui la pregunta es ¿si estamos enviando valores del tipo 100A,200A,o mayores a estos,se tendria que cambiar la variable LED(0-255) a tipo WORD? o no le afectaria? o alguien lo ha probado con valores en decenas de este tipo 10A,20A,digo esto para no cambiar la variable LED tipo Byte...Gracias por su atencion.



")