


soy nuevo en esto de la electronica y tengo un problema que para mi es importante y complicado de resolver.
Tengo un problema a la hora de programar este pic (16f628a), ya que no se como usar el oscilador interno a 4mhz, hasta ahora lo he venido haciendo con el propio programador (WinPic), pero para mi nuevo programa nada funciona, eso si en proteus funciona perfectamente.
Codigo en PicBasicPro
Este codigo en proteus funciona perfectamente, pero luego en la placa de prototipado no funciona.
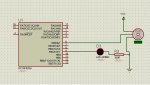
El esquema que monto es el siguiente (va en paint porque ahora no tengo eagle)
http://img88.imageshack.us/img88/4061/1servo.png
espero que puedan ayudarme, gracias
Tengo un problema a la hora de programar este pic (16f628a), ya que no se como usar el oscilador interno a 4mhz, hasta ahora lo he venido haciendo con el propio programador (WinPic), pero para mi nuevo programa nada funciona, eso si en proteus funciona perfectamente.
Codigo en PicBasicPro
Código:
n var byte
portb=0
inicio:
for n=50 to 250 step 1
pulsout portb.0,100
pause 100
next
for n=50 to 250 step 1
pulsout portb.0,150
pause 100
next
goto inicio
endEste codigo en proteus funciona perfectamente, pero luego en la placa de prototipado no funciona.
El esquema que monto es el siguiente (va en paint porque ahora no tengo eagle)
http://img88.imageshack.us/img88/4061/1servo.png
espero que puedan ayudarme, gracias
Última edición:

") si no quieres fallos ademas tienes el control del programa y el corre indefinidamente dependiendo de tu programacion solo mantienes un bucle infinito
si no quieres fallos ademas tienes el control del programa y el corre indefinidamente dependiendo de tu programacion solo mantienes un bucle infinito