Muy Buenas noches un Cordial saludo a toda la comunidad ")
Me estoy volviendo loco jejeje
actualmente tengo acá en mi mesa de trabajo un prototipo que he diseñado para operar una trackmaster tm400 la cual cumple la función de realizar esfuerzo físico al paciente con la finalidad de medir la arritmia cardíaca. es una maquina de un hermano de la iglesia soy Cristiano Adventista.
en proteuos me anda muy bien...
diseñe el código en flowcode 4
adjunto dejo los archivos para el que quiera examinarlo... por el momento solo hace un test del aparato verifica si se pulsa el botón test para iniciar una especie de prueba del equipo... baja verifica pulsador del suelo... sube cuenta tantas x veces pasa el motor con el sensor contador... mueve las velocidades posibles..
al realizar las pruebas en protoboard sin los rele solo leds conectados para ver la activad del micro... este trabaja cuando quiere. tengo conectado mclr con sus R1 10k R2 1k C1 0.1uf
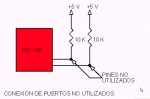
todas las salidas están a 0 y conectadas a GND tengo el Cerámico entre VDD y VSS por posible ruido.. sin éxito alguno... he leído infinidad de documentos que hablan de posible ruido.. que el oscilador.. los he realizado todos... y aun sin éxito alguno si pueden ayudarme os sera de gran ayuda no tengo interés comercial solo ayudar a este hermano en colocar en marcha este equipo medico. Gracias y que Dios los Bendiga
Me estoy volviendo loco jejeje
actualmente tengo acá en mi mesa de trabajo un prototipo que he diseñado para operar una trackmaster tm400 la cual cumple la función de realizar esfuerzo físico al paciente con la finalidad de medir la arritmia cardíaca. es una maquina de un hermano de la iglesia soy Cristiano Adventista.
en proteuos me anda muy bien...
diseñe el código en flowcode 4
adjunto dejo los archivos para el que quiera examinarlo... por el momento solo hace un test del aparato verifica si se pulsa el botón test para iniciar una especie de prueba del equipo... baja verifica pulsador del suelo... sube cuenta tantas x veces pasa el motor con el sensor contador... mueve las velocidades posibles..
al realizar las pruebas en protoboard sin los rele solo leds conectados para ver la activad del micro... este trabaja cuando quiere. tengo conectado mclr con sus R1 10k R2 1k C1 0.1uf
todas las salidas están a 0 y conectadas a GND tengo el Cerámico entre VDD y VSS por posible ruido.. sin éxito alguno... he leído infinidad de documentos que hablan de posible ruido.. que el oscilador.. los he realizado todos... y aun sin éxito alguno si pueden ayudarme os sera de gran ayuda no tengo interés comercial solo ayudar a este hermano en colocar en marcha este equipo medico. Gracias y que Dios los Bendiga