Buenas tardes.
Os comento..
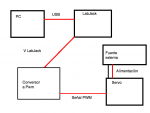
Estoy realizando un circuito para controlar un servo. Por una parte uso LabJack, con el que me comunico con el PC para la programacion y cambiar las entradas respectivas desde ahi.
Necesito obtener un PWM, pero como no me quedan terminales en el LabJack, lo hago a traves de un integrado (ahora mismo no recuerdo el nombre, manda ...). El tema es que hasta aqui bien. Obtengo el PWM y puedo variar el ancho de pulso a mi antojo desde el PC.
El problema viene cuando alimento un servo con esta señal. La señal se distorsiona mucho, y el nivel máximo del PWM, no para de subir y bajar, haciendo que el servo no este completamente quieto en la posicion deseada, sino que se mueve constantemente adelante y atras(el movimiento no es siquiera visible, se escucha..). Entonces mi duda es porque ocurre esto.
Mi teoria es que el integrado puede que no le inyecte la suficiente corriente, aunque me parece algo raro, ya que el servo lo tengo alimentado externamente con una fuente independiente. Y en el caso de que si fuera ese el problema, ¿como podria aumentarla sin que se viera modificado mi pulso PWM? ¿Transistor? ¿Amplificador operacional?
Ayuda..!!
Os comento..
Estoy realizando un circuito para controlar un servo. Por una parte uso LabJack, con el que me comunico con el PC para la programacion y cambiar las entradas respectivas desde ahi.
Necesito obtener un PWM, pero como no me quedan terminales en el LabJack, lo hago a traves de un integrado (ahora mismo no recuerdo el nombre, manda ...). El tema es que hasta aqui bien. Obtengo el PWM y puedo variar el ancho de pulso a mi antojo desde el PC.
El problema viene cuando alimento un servo con esta señal. La señal se distorsiona mucho, y el nivel máximo del PWM, no para de subir y bajar, haciendo que el servo no este completamente quieto en la posicion deseada, sino que se mueve constantemente adelante y atras(el movimiento no es siquiera visible, se escucha..). Entonces mi duda es porque ocurre esto.
Mi teoria es que el integrado puede que no le inyecte la suficiente corriente, aunque me parece algo raro, ya que el servo lo tengo alimentado externamente con una fuente independiente. Y en el caso de que si fuera ese el problema, ¿como podria aumentarla sin que se viera modificado mi pulso PWM? ¿Transistor? ¿Amplificador operacional?
Ayuda..!!
")